Origami Inspires 3D Printed Soft Robotics


Researchers from China have been inspired by origami structures and materials, leading them to the more complex development of robotics, as presented in the recently published “Origami spring-inspired metamaterials and robots: An attempt at fully programmable robotics.”
This is not the first time we have seen origami-inspired work, from innovative surgical instruments to expandable applications for engineering, antennas, and even folding robots. Moving far past just the art of folding delicate papers, in this study, the researchers sought to program materials into a robotic system. This meant examining not only 3D printability but also foldability and the required mechanical properties.
“In addition to mechanics approaches, the art of origami is now being accepted as an intuitive and fertile inspiration for mechanical metamaterial design due to its foldability, deployability, flexibility, scale-free geometry as well as programmable reconfiguration,” explained the researchers, noting that previous research has yielded miniaturized robots, soft robots, ingestible robots for medical tasks, compliant modules, medical devices, grippers, and more.
The team began with a foldable origami spring, and then moved on to metamaterial characters—exploring properties derived from geometries that fold. Ultimately, their prototype was capable of crawling behavior due to 3D printed materials that collapsed as needed.

Flowchart of transforming an origami model into a fully programmable robotic system.
The collapsible spring was inspired by a paper rectangle folded and twisted with uniform right triangles.
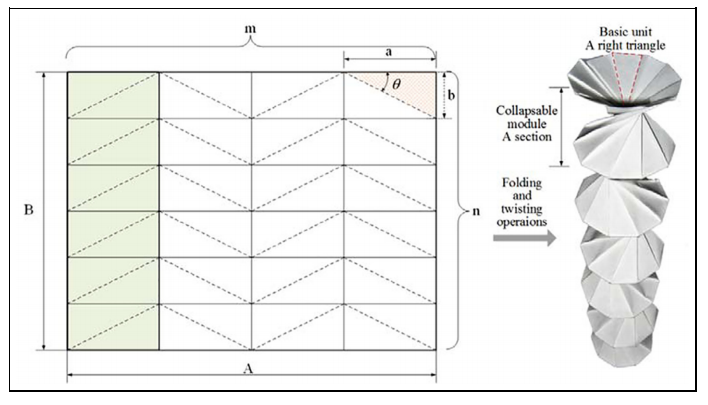
Geometry of the paper spring from a crease pattern to spiral form.
“From the top view, when the paper spring is being deployed, the width of the spring shrinks in a spiral manner and the overlapping areas between fans increase until complete overlapping in the maximum deployable state,” explained the researchers.

Intrinsic metamaterial mechanisms of the collapsible paper spring: (a) Status #1–#2: highly reversible compressibility, (b) status #2–#3: good switchability between transverse compression and longitudinal stretchability, and (c) status #4: curvilinear deployment.
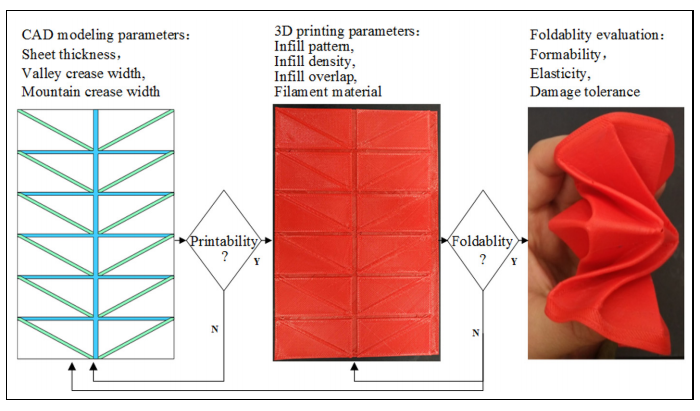
Digital fabrication flowchart of origami-inspired spring metamaterials.
Using their own customized 3D printer, PLA, and a 0.3mm FDM nozzle, they were able to “digitally work out the origami-inspired spring metamaterials.” They were able to create a soft gripper that proved to be “fully 3D printable” and helpful for picking up objects with more irregular shapes.
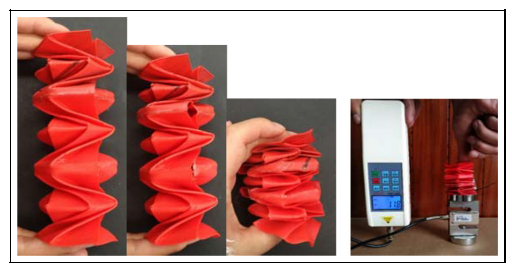
Origami-inspired spring metamaterials and their elasticity.
Overall, the team was able to employ 3D printing as a programmable control method, with the required mechanical properties—overcoming any obstacles regarding printability, foldability, and the need for better damage tolerance. Two types of soft robots were successfully fabricated, including their “creeping robot.”

A fully soft manipulator with a highly reversible compressible arm: (a) fully soft robotic arm with a three-finger gripper. (b) Pick and place a carton. (c) Pick and place a plastic bag
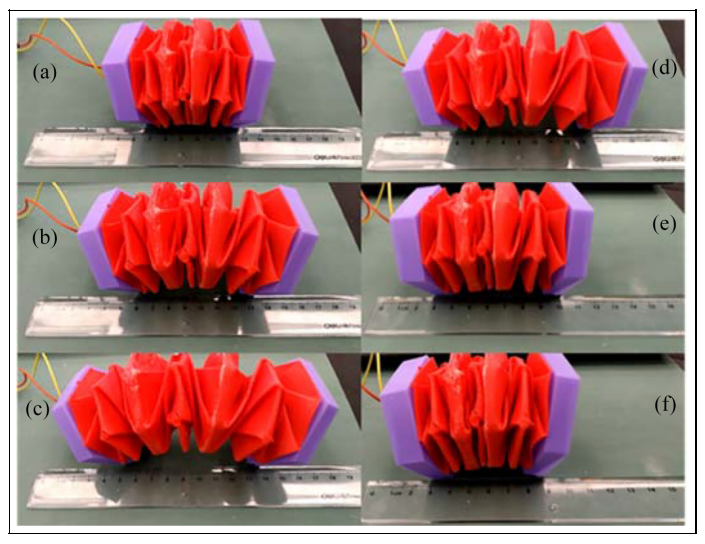
A peristaltic crawling robot with undulatory movements induced by curvilinear deployment. (a) Fully compressed state; (b) elongating state; (c) fully curvilinear deployment; (d) starting to compress; (e) compressing sate; and (e) fully compressed state
While 3D printing, 4D printing, and the use of metamaterials continue to expand via global research, soft robotics is also becoming more possible through more progressive technology like digital fabrication—leading to a variety of innovations to include biomimetic soft robots, integrated actuators, and even swimming soft robots.
[Source / Images: “Origami spring-inspired metamaterials and robots: An attempt at fully programmable robotics”]Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
3D Printing in Drones Could Reach $900 Million by 2034, AM Research Report Says
For years, additive manufacturing has searched for applications where its advantages clearly outweigh the limits of traditional production methods. Now, according to a new report from Additive Manufacturing Research (AM...
Largest Publicly Announced, Single Order in EOS History: Beehive Industries Spends $50M on M4 ONYX 3D Printers
Earlier this year, Beehive Industries received a $29.7 million contract to produce its Frenzy 6 and Frenzy 8 engines for the US Air Force. The metal additive manufacturing (AM) user...
3D Printing News Briefs, June 10, 2026: Grand Opening, Photoresins, Footwear, & More
We’re starting with some exciting news in today’s 3D Printing News Briefs: Stratasys just celebrated the opening of its new North American headquarters in Minnesota. Moving on, Nanoscribe is scaling...
Formlabs Launches the X1: Let’s Pack It In?
I’d like to share my disappointment. When Formlabs teased that something big was coming, I really hoped the firm would finally get around to making CNC machines, as it always...