
University of Leeds: 3D Printing Folding Robots Inspired by Origami


Akeel Abtan recently submitted a PhD thesis, ‘Design and Fabrication of Origami Elements for use in a Folding Robot Structure,’ to the University of Leeds (Institute of Design, Robotics and Optimisation School of Mechanical Engineering). Striving to develop robots that could transform as needed for search and rescue tasks, Abtan explored three different types of design structures.
While many of us may just think of robots as either fantastical cinematic constructs from movies like Star Wars, or in reality as offering assistance through assembly lines in factories, they are used in a variety of very real applications today—from medicine to manufacturing; however, one more specialized area where robots are extremely helpful is in exploration tasks—especially those that may be in disaster areas or in more detailed settings like intricate surgeries.
“Some of these tasks have very small and limited access. These tasks require operating robots with less damage to access. There are two examples of these situations which are the search and rescue of people from collapsed buildings and the surgery for difficult places in the body,” explains Abtan.
“The idea of using the robots in search and rescue tasks was proposed in 1980, but the search and rescue robots (SAR) were not used practically until the 11 September terrorist attack on the World Trade Centre. This regrettable event provided an opportunity to test the urban search and rescue robots (USAR) in real rubble piles.”
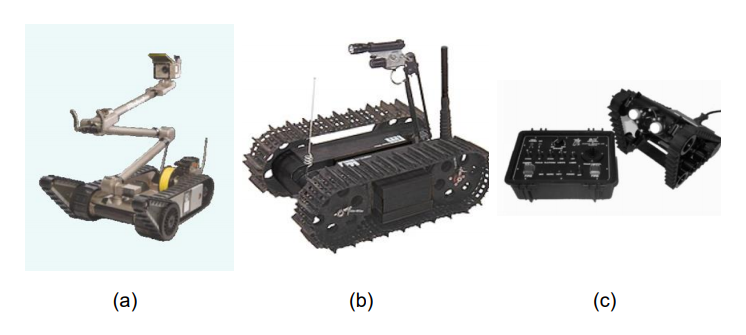
Types of some rescue robots that were used in the World Trade Centre disaster (a) The iRobot Packbot. (b) Foster–Miller Solem. (c) Inuktun MicroVGTV
In recent years, researchers have designed a wide range of robots to aid in different applications, to include:
- Modular robots
- Four-legged configurations
- Snake robots
- Swarm robots
- Minimally invasive robots
- Folding robots
- Self-folding structures

(a)The ATRON module, 11 cm in diameter. Left: CAD model of the ATRON module with plastic cover. Right: Photo of a fully functional ATRON. (b) Three groups of seven ATRON modules. From left to right, the configurations are snake, cluster-walk and car
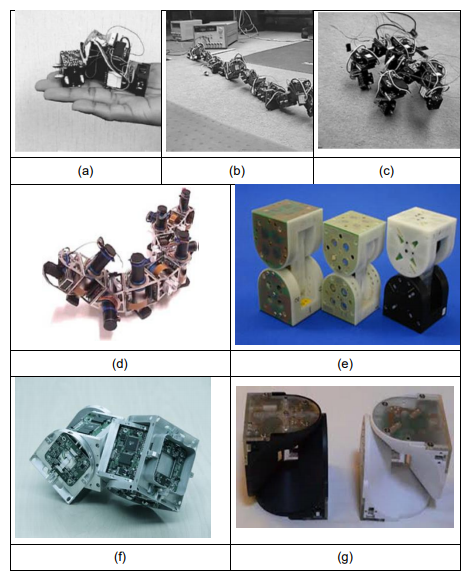
(a) Conro module. (b) Conro robot at snake form. (c) Conro robot at quadruped form. (d) Nine PlayBot modules attached together in a snake configuration. (e) M-TRAN Module I (left) II (center) III (right). (f)SuperBot module. (g) UBot modules. Active module (left). Passive module (right)

Snake Robot climbing a tree
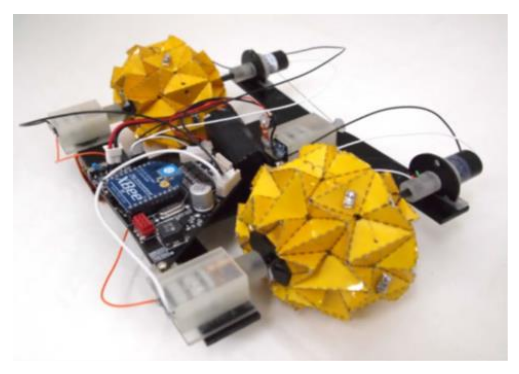
The Deformable Wheel Robot
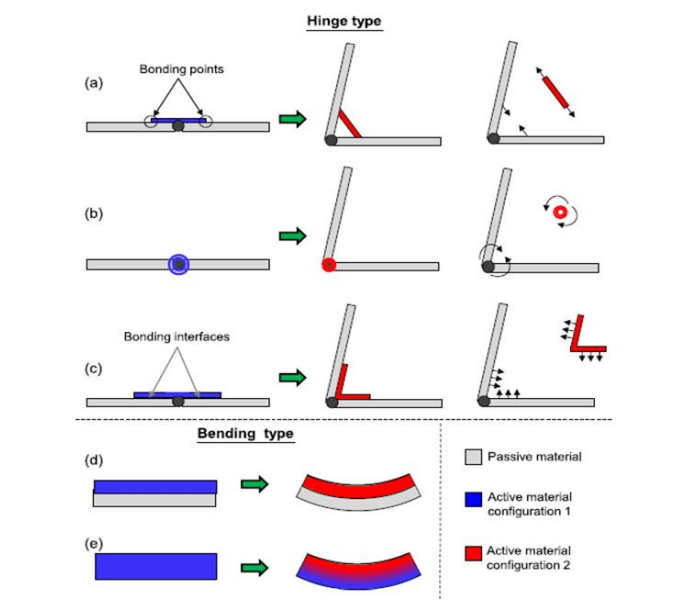
Basic active fold concepts. Hinge type: (a) extensional, (b) torsional, and (c) flexural. Individual simplified free body diagrams of the hinge-face structure and the active element are also shown. Bending type: (d) bilayer consisting of an active and a passive layer, and (e) single layer subjected to graded driving field
There are challenges in using any robots, however, just as there would be in using human resources to tackle such jobs. There may be access issues, threat of building collapse, or obstacles in delicate surgical issues. In most cases, robot size is the problem as the hardware must be diminutive enough to fit into small places but must also be able to move within them properly. With that in mind, Abtan reached toward origami for inspiration, integrating a design that could morph from small to large,

The size, weight and speed of some rescue robots.
“Origami robots are autonomous machines, whose shape and function are created by folding. Their bodies are made of several dynamic folds that perform together to actuate the machine. The origami robot is made of a single planar sheet that is folded into a complex 3D structure. Origami robots have built- in compliance because of the geometry of the folds and the creases in the material, and they are semi-soft, that is, they exhibit the properties of both rigid and soft robots,” explained Abtan.
“The origami approach to making robots can be considered a top-down approach. This is in contrast to the conventional bottom-up approach for making robots, that is, independent components such as nuts and bolts are manually assembled in an incremental way, requiring time, effort, and expertise. Origami robots provide an opportunity to simplify and accelerate the design and fabrication of robots.”
One obvious issue regarding origami robots is the need to replace paper with appropriate materials for the applications at hand.
“Until now there is no clear vision about origami structure behavior and many researchers still study various kinds of origami structures,” states Abtan.
The initial step for creating a folding robot is in understanding the origami structure, followed by researching folding types and mathematical descriptions. In some cases, they may need to be analyzed for potential in mechanical engineering applications. Abtan explores three basic origami structures: Miura, ball, and twisted tower. Dedicated research is required for designing the hinges and choosing proper materials.
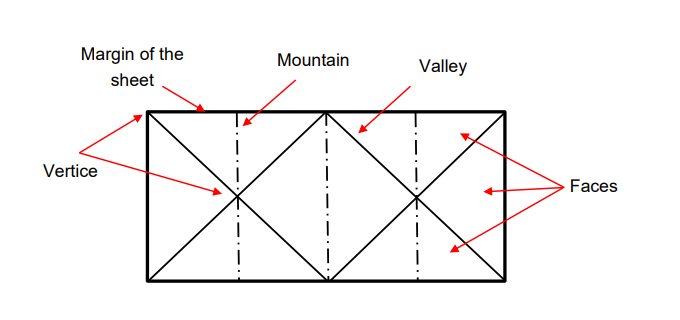
Crease pattern illustrating various origami concepts
For this study, a 3D printer was used to create a folding structure. Abtan used two different types of material (Vero for solid faces and TangoPlus FLX930 for soft crease lines), and then proceeded to perform tensile tests, bending tests, fatigue tests, and more.
“The results show that the strain limit of fatigue is 0.226 for high dynamic load, but it can be increased to 1.6 for low cyclic load,” stated Abtan. “Furthermore, the Tango plus FLX930 cannot fail due to tensile forces under this range of strain. The Kapton mechanical properties shows high tensile elongation compared with the Tango Plus material. The Kapton fatigue limit is calculated and the results show that the strain limit of fatigue is 0.1 for high dynamic load.”
The actuation system depended on the needs of the robot, with two different types of force transmission tools tested—the SK75 Dyneema rope and the 3D printed chain. Upon obtaining three different results upon measuring the breaking load of the 3D printed chain, Abtan noted that an embedded actuation system with smart materials was ‘suitable’ for a self-folding structure using SMA wire.
“The next step was to combine the OSM structure with the external actuation system in order to build an OSM-bot (Origami structure for manipulation robot). Merging the 3D printed structure, (that has hinges printed using Tango plus material), with SMW actuators to provide a self-folding structure was another step towards realizing self-folding structures,” stated Abtan.
With three methods available for making self-folding structures, the researchers chose all three—from manually cutting materials to using a laser cutter, to 3D printing—fabricating the crease pattern with two materials at once. The first try failed, with cracks on the edges and gaps at the borders. To solve the problem, the researchers created a new sample of the unit cell with 0.5 mm overlap of the Tango Plus material on the edges.

(a)Origami ball pattern printed by using 3D printer with multi-materials
technique. (b) Gaps at the border between solid and soft material.
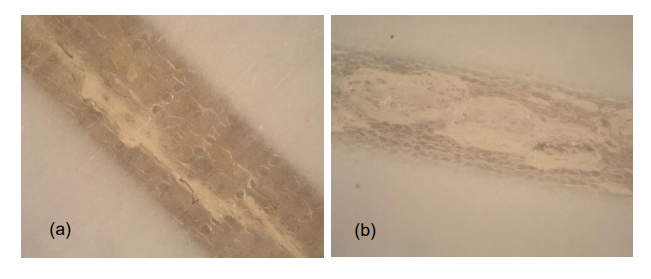
Microscopic photos of the hinge printed using Tango Plus flx930 material. (a) Gaps at the border between solid and soft material. (b) The cracks on the surface of the soft material.
“A self-folding cube was fabricated by using this 3D printing approach. The cube was activated by using five BSW actuators with uniform heating activation. The cube operates a stable folding process within 19 seconds,” said Abtan.
The OSM-Bot was made using paper cards, and an external actuator with four servos and Sk75 Dyneema rope used for force transmission.
“The OSM-Bot shows the ability to be manipulated using contraction and bending motion in four directions,” concluded Abtan. “Two other ways to fabricate the OSM-Bot are investigated: the acrylic-Kapton with laser cutting approach, and the 3D printing approach. The two methods fail to build a stable OSM-Bot structure that could operate like the card paper origami structure.”
3D printing and soft robotics are often connected, and the inspiration of origami is sometimes used in other projects too, from strengthening metamaterials to fabricating expandable structures, and improving lattices.
[Source / Images: ‘Design and Fabrication of Origami Elements for use in a Folding Robot Structure’]Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
How One Artist Is Using 3D Printing to Tell Stories About the Ocean
Artist Kimberly Callas sees something different when she looks at a 3D printer. Where others see a machine for making parts, she sees a way to tell stories about the...
Bambu Lab Wants Home 3D Printing to Feel Less Like a Workshop with PLA Pure
As desktop 3D printers become increasingly common in homes, Bambu Lab is focusing attention on something beyond print speed and hardware features. This week, the company launched a new filament,...
AM Asia Watch: China Exported 2.46 Million 3D Printers in Four Months
China’s consumer 3D printer industry seems to be reaching a new level of global dominance. According to Chinese state media outlet China Global Television Network (CGTN), China exported 2.46 million...
Bambu Launches A2L: What the New Printer Reveals About Its Strategy
Bambu Lab continues its relentless march for 3D printing domination with the launch of the A2L. The 330 × 320 × 325 mm printer will have a nozzle temperature of...































