Developing 3D Printed Soft Actuators for Robotic Arms
As 3D printing and electronics continue to advance—along with robotics—soft actuators are becoming a great subject of study, as thesis student Hong Fai Lau outlines in the recently published ‘3D-Printed Inflatable Actuators – Design and Development of Soft Actuators for a Pneumatically-Actuated Soft Robotic Arm.’ Studying the design process, but also parameters and interdependencies, Hong Fai Lau experiments with 3D printing inflatable actuators for the eventual possibility of using them in a robotic arm integrating two degrees of freedom.
Hong Fai Lau realizes there is a serious shift happening with the advent of soft actuators, and more specifically, those that are inflatable:
“In a typical actuator made from rigid materials, for example, a Series Elastic Actuator or a Variable Stiffness Actuator, the schematics, components, and control together define the function of the device. In a soft inflatable actuator, however, its function solely depends on its mechanical design.”
Creating such actuators is no easy feat, however, accompanied by an ‘exhaustive list’ of parameters. Hong Fai Lau realizes that the actuator with the most potential is the Elastic Inflatable Actuator (EIA)—a device that functions while under positive pressure. Other actuators with great promise are the Bending-type EIA and the Rotary Soft Pneumatic Actuator, featuring an ‘inelastic’ fabric layer that bypasses the need for an external mechanism.
For 3D printing in this research, Hong Fai Lau explored both multi-jet fusion and PolyJet, using a design suitable for a soft robotic arm with two DoF.

The realized 3D printed inflatable rotary actuator.
The author found this part of the project particularly challenging as the design required two different phases based on complexity, with all the following design details:
- Large range of motion
- Ability to actuate under pressure
- Ease in manufacturing
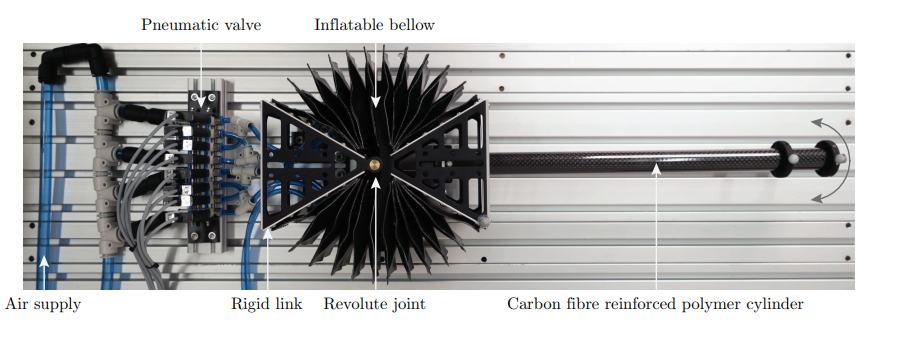
The current iteration of the one DoF soft robotic arm.
First, the linear actuators were created, with both shape and suitable materials studied. Next, the analysis was used to create a complete mechanical design for the research project, furthered with both simulation and experimentation. In exploring all the challenges in creating such work, the author points out that it is always better to seek inspiration from nature.
In the future, the researcher expects to see more use of flexible materials for 3D printing—along with ‘application in the rotational domain.’ Also expected are integration of design parameter optimization, and further exploration of 3D printing parts for the robotic arm—along with creating lighter weight components.
“In conclusion, the realized 3D printed inflatable rotary actuator is an effective first conceptual prototype for the future soft robotic arm with two DoF,” stated the author.
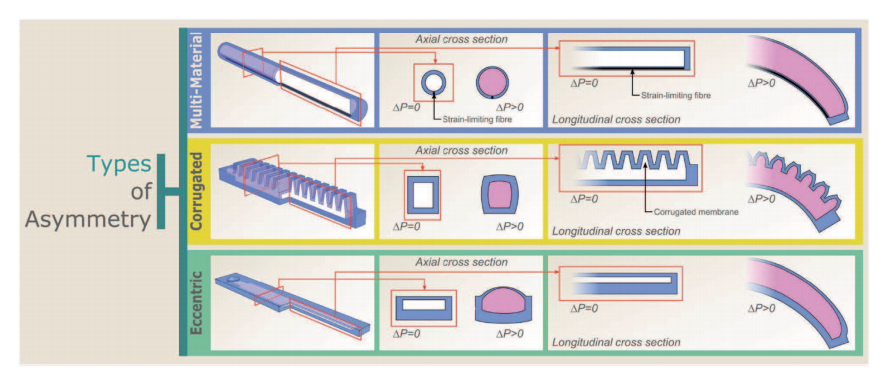
Various types of asymmetry embedded into bending-type EIAs. Reprinted from Advanced Materials, vol. 29, no. 43, Benjamin Gorissen, Dominiek Reynaerts, Satoshi Konishi, et al., Elastic Inflatable Actuators for Soft Robotics Applications, 2017, with permission from John Wiley and Sons. © 2017, WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim
Soft actuators are being created within the 3D printing realm more commonly today from using shape memory polymers to more technical 4D printing, and components that are highly optimized. What do you think of this news? Let us know your thoughts! Join the discussion of this and other 3D printing topics at 3DPrintBoard.com.
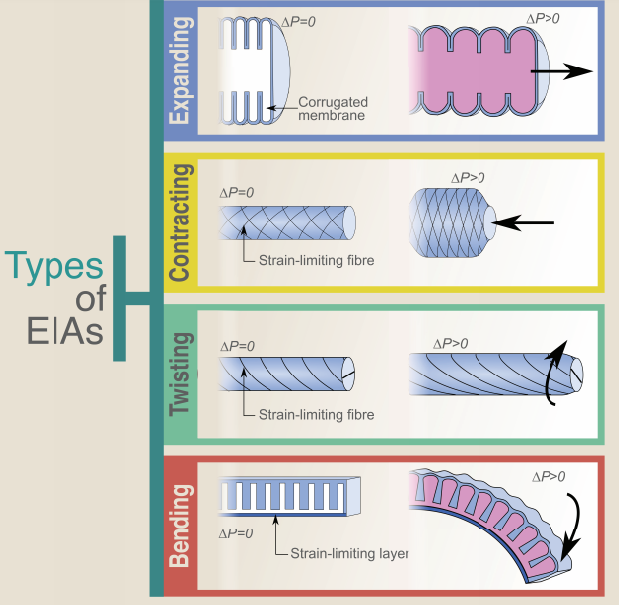
Various types of EIAs. Reprinted from Advanced Materials, vol. 29, no. 43, Benjamin Gorissen, Dominiek Reynaerts, Satoshi Konishi, et al., Elastic Inflatable Actuators for Soft Robotics Applications, 2017, with permission from John Wiley and Sons. © 2017, WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services







You May Also Like
New Business: Temporary, Migratory, & Modular 3D Printed Architecture
If we look at potentially emerging 3D printing businesses, then architecture has not been fully explored. Yes, there is a lot of house 3D printing going on worldwide. From deployable...
3D Printing News Briefs, April 19, 2025: Material Extrusion Standard, Metal Powder, & More
In today’s 3D Printing News Briefs, we’re covering a proposed standard for material extrusion, before moving on to business and metal powder. We’ll end with a commercial store’s robotic 3D...
Japan Unveils World’s First 3D Printed Train Station
Japan is now home to what we believe is the world’s first train station built with 3D printing technology. Located in Arida City, just south of Osaka, the new Hatsushima...
restor3d Raises $38M to Expand 3D Printed Orthopedic Implants
Backed by $38 million in new funding, restor3d is pushing ahead with the launch of four personalized implant lines, set to roll out in 2025 and 2026. This latest venture...