
Researchers Use Shape Memory Polymers to Increase Stiffness of 3D Printed Soft Actuators



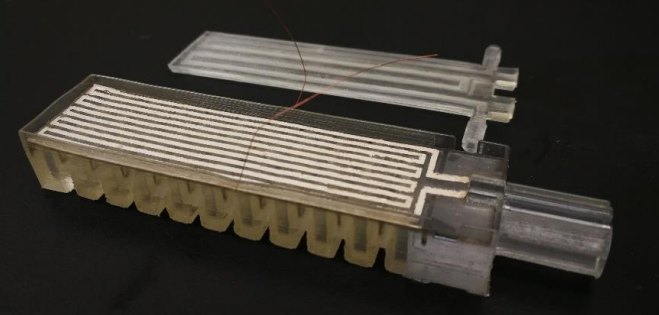
Conductive ink lines printed with DIW method
While soft robots are very flexible, and adaptive to more complex environments, they aren’t great at completing tasks with a high load capacity due to the low stiffness of constituent materials. Attempts have been made to use variable stiffness materials and structures in order to develop stiffness‐tunable soft actuators, but these are limited by factors such as small deformations, slow responses, and difficulty fabricating microfeatures.
 A team of researchers from the Singapore University of Technology and Design (SUTD) and Shanghai Jiao Tong University (SJTU) recently published a paper, titled “Fast-Response, Stiffness-Tunable Soft Actuator by Hybrid Multimaterial 3D Printing,” detailing their efforts to fix this issue.
A team of researchers from the Singapore University of Technology and Design (SUTD) and Shanghai Jiao Tong University (SJTU) recently published a paper, titled “Fast-Response, Stiffness-Tunable Soft Actuator by Hybrid Multimaterial 3D Printing,” detailing their efforts to fix this issue.
The abstract reads, “This work presents a paradigm to design and manufacture fast‐response, stiffness‐tunable (FRST) soft actuators via hybrid multimaterial 3D printing. The integration of a shape memory polymer layer into the fully printed actuator body enhances its stiffness by up to 120 times without sacrificing flexibility and adaptivity. The printed Joule‐heating circuit and fluidic cooling microchannel enable fast heating and cooling rates and allow the FRST actuator to complete a softening–stiffening cycle within 32 s. Numerical simulations are used to optimize the load capacity and thermal rates. The high load capacity and shape adaptivity of the FRST actuator are finally demonstrated by a robotic gripper with three FRST actuators that can grasp and lift objects with arbitrary shapes and various weights spanning from less than 10 g to up to 1.5 kg.”
 The researchers used a Stratasys J750 PolyJet 3D printer to manufacture the four components for the actuator, using VeroClear and VeroBlack material.
The researchers used a Stratasys J750 PolyJet 3D printer to manufacture the four components for the actuator, using VeroClear and VeroBlack material.
“Once clean, the SMP slice I was taken to our self-built DIW device for the fabrication of the Joule-heating circuit,” the researchers wrote. “A syringe was held vertically on the DIW device, and its translations in the printing plane were enabled by linear stages…which were precisely controlled by stepper motors.”
The 3D printed SMP slice with the Joule-heating circuit was placed in a universal oven in order to sinter the Ag NP circuit before being bonded with the body of the actuator. In each spacer between neighboring air chambers in the actuator body, a slot was created in order to receive an insert for the SMP slice.
“The slot-and-insert design would enhance the bonding strength at the interface to better limit the cover layer’s strain under inflation and inhibit the air from travelling outside the central channel,” the researchers explained.
Schematics of VeroClear sample for tensile test. The values are in mm.
Once the bonding interfaces were cured, the team tested how airtight everything was, then inserted conductive wires through the actuator base’s channels, which were connected to the Joule-heating circuit and then sintered. The SMP slice II was bonded with the elastomeric sheet using VeroClear, and the processed parts were bonded together, again using VeroClear.
The researchers performed all kinds of tests on their 3D printed soft actuator, including a DMA test, tensile tests at 25 °C and 70 °C, a stiffness-tunable strip test, and others. A characterization test on a single FRST actuator’s load capacity was completed, and the team also conducted finite-element simulations in an effort to learn more about the stiffness variation mechanism.
The researchers wrote, “To gain insight on potential ways to improve the load capacity, we simulated the bending stiffness tests by varying two parameters, namely the SMP layer thickness and material modulus at room temperature.”
Finite-element simulations were also completed for heating and cooling tests, and the researchers also characterized the printing parameters.
Thermistor glued to innermost surface of SMP component with leads extending out from side edges of the actuator.
The field of soft robotics is helping people change their perception of robots as hard, metal creations to something that is more fluid and flexible. Through their experiments, the joint SUTD/SJTU research team found that by adding shape memory polymers to the mix, their 3D printed soft actuator’s body became up to 120 times stiffer, but without sacrificing adaptivity or flexibility – making it far more effective at carrying high loads.
Co-authors of the paper are Yuan‐Fang Zhang, Ningbin Zhang, Hardik Hingorani, Ningyuan Ding, Dong Wang, Chao Yuan, Biao Zhang, Guoying Gu, and Qi Ge.
Discuss this research and other 3D printing topics at 3DPrintBoard.com or share your thoughts in the Facebook comments below.
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
APAC’s 3D Printing Capital Wave Is Bigger Than Venture Funding
By the usual measure, a tally of funding rounds, APAC’s additive manufacturing market had a quiet second quarter. The capital that has actually closed across the region comes to about...
HP Stock Jumps on 3D Printing Buzz
HP (NYSE: HPQ) had its best day in over a year this week, with shares jumping more than 7% on Tuesday. Interestingly, the move was quickly tied to 3D printing,...
3D Printing News Briefs, April 8, 2026: LiDAR Scanning, Vapor Smoothing, FDM Optimization, & More
We’ll kick off today’s 3D Printing News Briefs with some 3D scanning news from Artec 3D, and then move on to new America Makes Project Calls. Then, Raise3D and AMT...
3D Printing Market Hits $16B in 2025 as Growth Picks Up Again
The global 3D printing market reached $16 billion in 2025, growing just over 10% year over year, according to new data from Additive Manufacturing Research (AM Research). After a slower...
































