
MIT: Automated System Designs and 3D Prints Optimized Actuators and Displays to Spec


 Actuators are complex devices that mechanically control robotic systems in response to electrical signals received. Depending on the specific application they’re used for, today’s robotic actuators have to be optimized for a variety of features, such as appearance, efficiency, flexibility, power consumption, and weight, and all of those parameters have to be manually calculated by researchers to find the right design; add 3D printing with multiple materials to make one product and things get even more complicated. This obviously leaves a lot of room open for human error.
Actuators are complex devices that mechanically control robotic systems in response to electrical signals received. Depending on the specific application they’re used for, today’s robotic actuators have to be optimized for a variety of features, such as appearance, efficiency, flexibility, power consumption, and weight, and all of those parameters have to be manually calculated by researchers to find the right design; add 3D printing with multiple materials to make one product and things get even more complicated. This obviously leaves a lot of room open for human error.
But, a team of researchers from MIT – which knows a thing or two about 3D printing actuators – developed an automated system that can design and 3D print actuators that are optimized to many specifications. Basically, this system is completing a task that’s too complex for researchers to do the old school way.
“Our ultimate goal is to automatically find an optimal design for any problem, and then use the output of our optimized design to fabricate it. We go from selecting the printing materials, to finding the optimal design, to fabricating the final product in almost a completely automated way,” stated Subramanian Sundaram PhD ’18, a former graduate student in MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL).
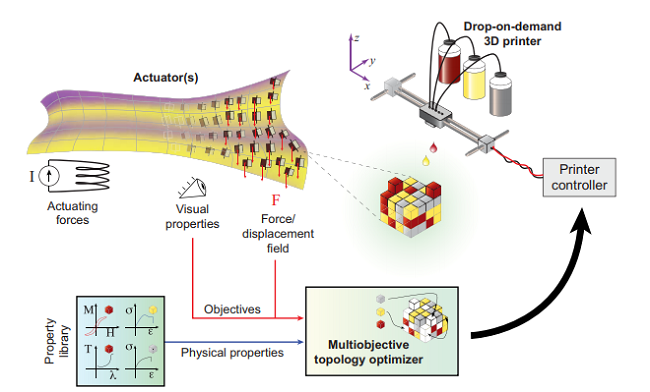
Overview of the specification-driven 3D printing process. The structure of individual actuators (or the arrangement of multiple actuators) is optimized using a multiobjective topology optimization process. The optimization uses the bulk physical properties of the individual materials and the functional objectives as inputs. The generated optimized voxel-based representation of the structure is used by the printer to fabricate the optimized structure using a drop-on-demand inkjet printing process. A rigid acrylate polymer (RIG), an elastic acrylate polymer (ELA), and a magnetic nanoparticle (Fe3O4)/ polymer composite (MPC) are the materials used. The contrast in the optical, mechanical, and magnetic properties is used to simultaneously optimize the visual appearance and actuating forces while generating voxel-level design.
Sundaram is the first author of a paper, titled “Topology optimization and 3D printing of multimaterial magnetic actuators and displays,” that was published in Science Advances; additional authors are former MIT postdoc Melina Skouras; David S. Kim, a former researcher in the Computational Fabrication Group; Louise van den Heuvel ’14, SM ’16; and Wojciech Matusik, head of the Computational Fabrication Group and an MIT associate professor in electrical engineering and computer science.
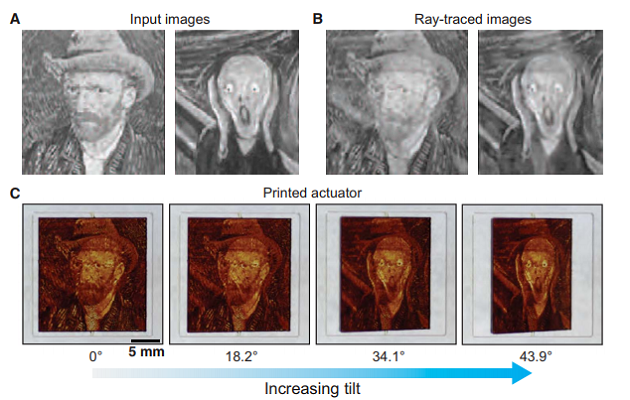
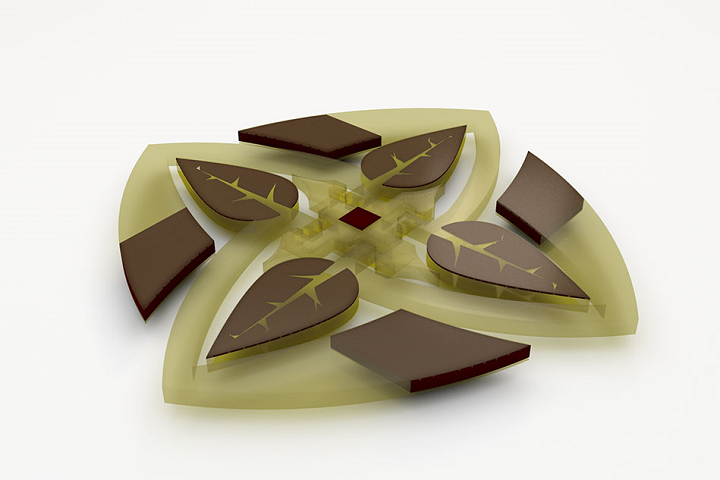
To show how their system works, the researchers used it to make actuators that show two black-and-white images at different angles. When it’s flat, one actuator shows a Vincent van Gogh portrait, but tilted at an angle once it’s been activated, the image shifts to Edvard Munch’s famous painting “The Scream.” Another example they created are 3D printed floating water lilies, which feature petals that have actuator arrays and hinges that fold in response to magnetic fields that are run through conductive fluids.

When multiple materials are used to 3D print one product, the design’s dimensionality gets pretty high.
Sundaram explained, “What you’re left with is what’s called a ‘combinatorial explosion,’ where you essentially have so many combinations of materials and properties that you don’t have a chance to evaluate every combination to create an optimal structure.”
Three polymer materials were customized with the specific properties of color, magnetization, and rigidity that were needed to build the actuators, producing an opaque flexible material used as a hinge, a brown nanoparticle material that responds to a magnetic signal, and an almost transparent rigid material. Then, the characterization data is added into a property library, and the system draws from this to assign various materials to fill different voxels. Grayscale images, like the flat actuator which displays van Gogh’s portrait until it’s tilted into “The Scream,” are used as system input.
Panel optimization for both optical and mechanical properties, given a pair of target grayscale images.
Then, through a sort of trial and error process, 5.5 million voxels are “iteratively reconfigured” in a simulation to match a specific image and “meet a measured angle.” If the arrangement of voxels doesn’t portray the target images, both at an angle and straight on, an error signal tells the system which voxels are correct and which need to be changed. For example, if the brown magnetic voxels are shifted, removed, or added, the actuator’s angle will change when a magnetic field is applied, but how this alignment will affect the target image must also be taken into consideration.
A computer graphics technique called “ray-tracing,” which simulates the path of light interacting with objects, was used to compute the appearances of the actuators at each iteration. These simulated beams shine through the actuator at each voxel column, which can contain over 100 voxels. If an actuator is flat, the beam produces a dark tone by shining down on a column with lots of brown voxels. But when it’s tilted, misaligned voxels will be illuminated, and clear voxels may shift into the beam, while brown ones move away, so a lighter tone appears.
“We’re comparing what that [voxel column] looks like when it’s flat or when it’s titled, to match the target images. If not, you can swap, say, a clear voxel with a brown one. If that’s an improvement, we keep this new suggestion and make other changes over and over again,” explained Sundaram.
The MIT system uses ray-tracing to align both light and dark voxel columns in the appropriate spots for the flat and angled images. Eventually, after a few to dozens of hours and 100 million iterations, the correct placement of each material in each voxel is found to generate two images at two angles.
A custom 3D printer with drop-on-demand inkjet technology is used to make the actuator. Tubs of the different materials are connected to print heads with individually controlled nozzles, and the designated material is dropped, layer by layer, into each of the voxels.
Sundaram says their work could be a step in the right direction for designing large structures like airplane wings. Actuators that have been optimized for appearance and function could also be used for biomimicry in robotics.
Sundaram said, “You can imagine underwater robots having whole arrays of actuators coating the surface of their skins, which can be optimized for drag and turning efficiently, and so on.”
Discuss this and other 3D printing topics at 3DPrintBoard.com or share your thoughts below.
[Source/Images: MIT]Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
The Drone Industry is Showing Where 3D Printing Delivers Real Value, AM Research Report Finds
The rapid rise of drones is creating one of the biggest opportunities for additive manufacturing (AM). Whether they’re used on battlefields, inspecting bridges or crops, or delivering supplies, drones need...
3D Printing News Briefs, June 27, 2026: Nanoscale 3D Printing, Defense Readiness, & More
We’re starting with a story about a grant for advanced nanoscale 3D printing in this weekend’s 3D Printing News Briefs, and then on to metal additive manufacturing (AM) for defense...
US Army Awards Continuous Composites 3D Printed Missile Component Contract
Despite the very loud, indignant claims from American defense officials that the US hasn’t depleted a significant portion of its munitions stockpiles, the US has depleted a significant portion of...
Rheinmetall Uses Ducting Made with Minifactory for Challenger 3 Tanks
Rheinmetall UK is using Minifactory Material Extusion as the primary production method for tank ducting on the Challenger 3 Main Battle Tank program. The Challenger 3 is the UK’s formidable...































