Meet the Bat Bot: Aerial Robotics and Biomimetics Research Result in Caltech’s New Autonomous Drone


![]() Look, up in the sky! It’s a bird, it’s a plane, it’s…Batman! In my humble opinion, this is how that phrase should really go; Superman has always been a little too squeaky clean for my liking. I know that Batman can really only fly when he’s in the Batcopter, but that’s part of why I like him – he’s not an actual superhero with superpowers. Granted, he’s a genius billionaire with all kinds of resources, but even so. So I guess a more accurate phrase would be, “It’s a bird, it’s a plane, it’s…a bat!” But today, I’m not talking about an ordinary bat. I’m talking about Bat Bot, the awesome result of aerial robotics research by Caltech and the University of Illinois at Urbana-Champaign (UIUC). This creation was inspired by the real flying mammal itself, and scientists hope that over time, Bat Bot can be developed for use in fields like disaster rescue and personal assistance.
Look, up in the sky! It’s a bird, it’s a plane, it’s…Batman! In my humble opinion, this is how that phrase should really go; Superman has always been a little too squeaky clean for my liking. I know that Batman can really only fly when he’s in the Batcopter, but that’s part of why I like him – he’s not an actual superhero with superpowers. Granted, he’s a genius billionaire with all kinds of resources, but even so. So I guess a more accurate phrase would be, “It’s a bird, it’s a plane, it’s…a bat!” But today, I’m not talking about an ordinary bat. I’m talking about Bat Bot, the awesome result of aerial robotics research by Caltech and the University of Illinois at Urbana-Champaign (UIUC). This creation was inspired by the real flying mammal itself, and scientists hope that over time, Bat Bot can be developed for use in fields like disaster rescue and personal assistance.
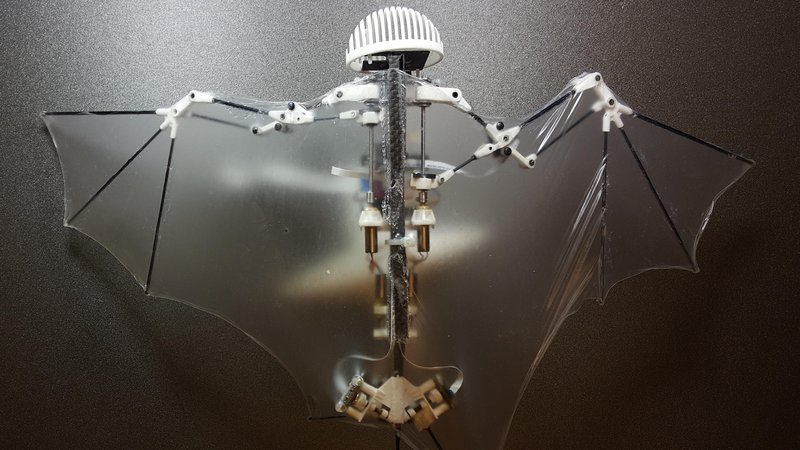
It is hoped that the ‘Bat Bot’ could one day be used for disaster rescue and other problem solving [Image: Ramezani, Chung, Hutchinson, Sci. Robot. 2]
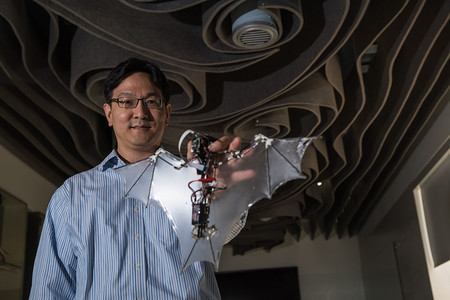
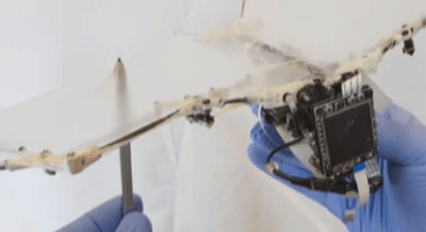
Soon-Jo Chung, associate professor of aerospace and Bren Scholar at Caltech, holds the Bat Bot. [Image: Caltech]
Chung said, “This robot design will help us build safer and more efficient flying robots, and also give us more insight into the way bats fly.”
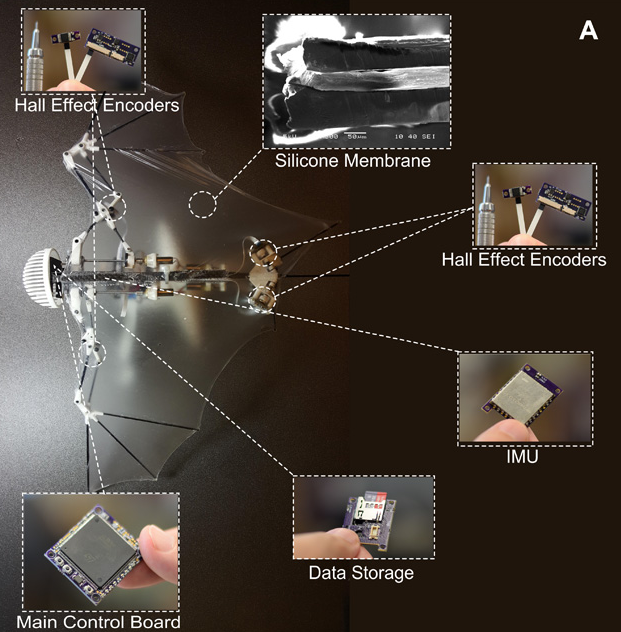
The research team learned that the most important components of how bats stroke their wings are the side to side tail swish and the shoulder, elbow, and wrist bend. One of the major research challenges was to create wings that were able to change shape while flapping, mimicking a bat’s wing. Nylon and Mylar were determined not to be stretchable enough for the task, so the team developed a soft but strong, ultra-thin (only 56 microns) silicone-based membrane, which covers the nine key joints of the Bat Bot’s one-foot wingspan.
The paper abstract states, “We have successfully achieved autonomous flight of B2 using a series of virtual constraints to control the articulated, morphing wings.”
 The Bat Bot only weighs 93 grams, and was built using lightweight carbon fiber bones and 3D printed socket joints. Most flying robots use spinning rotor blades, or up and down flapping motions, to lift off and propel into the air, which is fairly limiting. But the Bat Bot is able to alter its wing shape by extending, flexing, and twisting at its wrists, legs, shoulders, and elbows, and move each wing independently of the other. The flapping of the wings amplifies the motion of the robot actuators, and it also conserves the little animal-shaped drone’s battery power, both of which make the Bat Bot quieter and more efficient than quadcopters or fixed-wing drones.
The Bat Bot only weighs 93 grams, and was built using lightweight carbon fiber bones and 3D printed socket joints. Most flying robots use spinning rotor blades, or up and down flapping motions, to lift off and propel into the air, which is fairly limiting. But the Bat Bot is able to alter its wing shape by extending, flexing, and twisting at its wrists, legs, shoulders, and elbows, and move each wing independently of the other. The flapping of the wings amplifies the motion of the robot actuators, and it also conserves the little animal-shaped drone’s battery power, both of which make the Bat Bot quieter and more efficient than quadcopters or fixed-wing drones.
Ramezani says, “Our work demonstrates one of the most advanced designs to date of a self-contained flapping-winged aerial robot with bat morphology that is able to perform autonomous flight.”
[Image: Science Robotics]
Watch the video to learn more about how Bat Bot was created:
Discuss in the Bat Bot forum at 3DPB.com.
[Source: Caltech]
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
Beyond Generative Design: Can AI-Driven 3D Printing Truly Deliver on Precision?
Artificial Intelligence (AI) has brought a new look to the hardware engineering domain. Using generative design algorithms, engineers put performance parameters and weight constraints together and the program generates complex,...
The Next Phase of EB-PBF Will Be Defined by Beam Control
The bar for metal additive manufacturing has moved. Early on, the question was often simple: Can the machine print the material and produce a dense part? That still matters, but...
The SLS Market, Game of Trucks: Part 2
With the release of the new HP 1200 and the Formlabs X1, we can see real competition from very different segments. From several million dollars to just $20,000, the laser...
Australia’s AMCRC Funds Titanium 3D Printing R&D
In terms of the global economy’s presently existing state, there is no realistic path to economic resilience that doesn’t start with critical minerals security. This is a problem for pretty...