Embedded 3D Printing and Sensors Lead to Soft Robotic Fingers


Robotics and 3D printing have gone hand in hand for years, but researchers Ryan L. Truby, Robert K. Katzschmann, Jennifer A. Lewis, and Daniela Rus have put a much more literal touch on that in their study, ‘Soft Robotic Fingers with Embedded Ionogel Sensors and Discrete Actuation Modes for Somatosensitive Manipulation,’ outlining their latest innovations: grippers that are highly functional due to their adaptability for gripping.
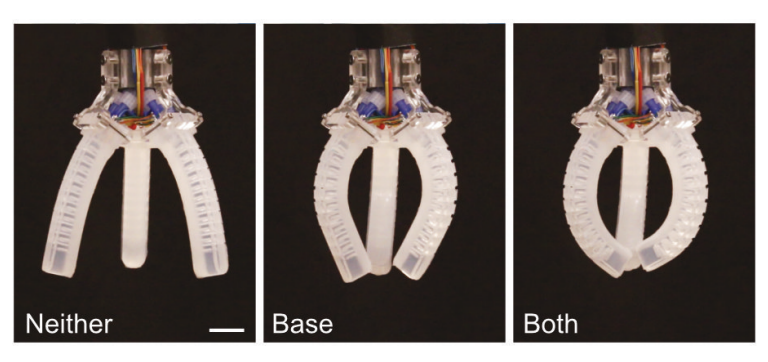
Examples of manipulator poses. Photographs of the soft gripper during no (left), base-only (center), and full-finger actuation at inflation pressures of 140 kPa. Scale bar is 15 mm.
Rigid robots are obviously unwieldy for many applications. Up until now, however, it has still been difficult to design and manufacture soft actuators with the desired features, as they require extensive dexterity in action and a closed-loop control mechanism. Here, 3D printed embedding is the key to making soft robotic grippers shaped like hands, able to show us the future for such devices in applications like:
- Automated assembly
- Packaging
- Prosthetics
- Conservation
- Extreme environments

Examples of object grasping. (a-b) Examples of grasping poses are shown for holding a toy strawberry (a) and pear (b) during base-only (left) and full-finger actuation (right). (c) Examples of objects that can be grasped by the soft gripper with appropriate pre-grasp orientation. Inflation pressure is 140 kPa in each photograph. Scale bars are 15 mm.
“However, creating soft robots with multi-degree-of-freedom (DOF) actuation and somatosensory capabilities remains a significant hurdle that limits their practical use in these areas,” state the researchers. “Most soft robotic manipulators operate via open-loop control and have simple, single-DOF actuation, such as uniform bending or twisting.
“Given the simplicity of fluidic actuation and molding-based fabrication techniques, fluidic elastomer actuators (FEAs) are a popular platform for producing soft manipulators. Unfortunately, these techniques require multiple assembly steps, especially when multi-DOF actuators are desired.”
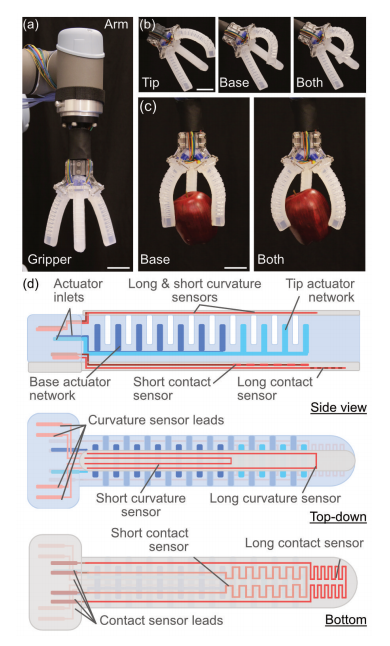
Soft robotic gripper with EMB3D printed soft fingers. (a) Three fingers comprise a soft gripper fixed to a robot arm. (b) Inflating the tip (left), base (center), or tip and base (right) actuator networks enable three modes of finger bending and (c) different grasps. (d) Schematics of the finger from side (top), top-down (middle), and bottom-up (bottom) views. Scale bars are 30 mm.
The need for sensors often makes devices like this unlikely as greater complexity is added to the design and the actual manufacturing. For this study, and the integration of soft somatosensitive manipulation, the research team strategized on how to make actuators comprised of both discrete actuation modes and integrated sensors. Luckily, they were able to turn to 3D printing, a technology often quite appealing to persistent innovators who know ‘where there is a will there is a way.’
Each finger is made up of two ‘fluidic networks’ running throughout the artificial tip, base, and ‘full-finger actuation.’ There are a variety of different ways that the hand can grip, with four different sensors controlling each digit that contains an organic ionogel for sensory feedback.
“Fabricating FEA-based soft robots with integrated sensors and multi-DOF actuation requires many steps,” state the researchers. “Prior work has used molding techniques to make soft quadrupeds, swimming fish, tentacle-like actuators, and hand-like manipulators with several DOF.
“By contrast, 3D printing offers a promising approach for rapidly designing and fabricating complex soft actuators. Several light and ink-based printing techniques have recently emerged for directly building multi-DOF soft fingers, legs, grippers, and integrated robotic systems.”
The FEAs may work in either a rigid or soft capacity, but the researchers point out that more traditional, less flexible sensors do not work with FEA soft elastomers. The rigid parts that are required for the elastomeric waveguides do not interface well either. The team goes on to point out also that liquid metal sensors are not a good choice due to the ‘potential displacement of their passivating oxide layers over time.’
As is so often the case in human creativity, science, and 3D design, nature is an enormous inspiration. For this study, the researchers drew on the natural sensory capabilities and dexterity of human hands, creating the three-fingered robotic gripper. Each one was 3D printed using EMB3D printing, which allows for arbitrary patterns to be created—and here, the design is modular. 3D printing took around 90 minutes, curing overnight, and then the parts were refrigerated for an hour to liquefy the ink. The soft fingers were wired together, and then inflated with a pneumatic valve.
“We are now actively pursuing new multi-DOF, sensorized soft actuator designs using these methods to create more complex types of dexterous, soft robotic manipulators,” concluded the researchers. “Soft manipulator designs that we are exploring have different finger numbers, orientations, designs, and sensing motifs than the gripper presented here. Working with established algorithms in grasp planning with soft grippers and object recognition, we aim to develop soft robots with advanced manipulation capabilities that will be useful in myriad applications.”
3D printing allows users (and researchers especially) much more latitude in the lab, and along with accompanying electronics and robotics applications, this often involves experimentation and innovation resulting in items like stretchable electronics, liquid applications, and integration within the internet of things. Find out more about the use of embedded 3D printing for robotics here. What do you think of this news? Let us know your thoughts! Join the discussion of this and other 3D printing topics at 3DPrintBoard.com.
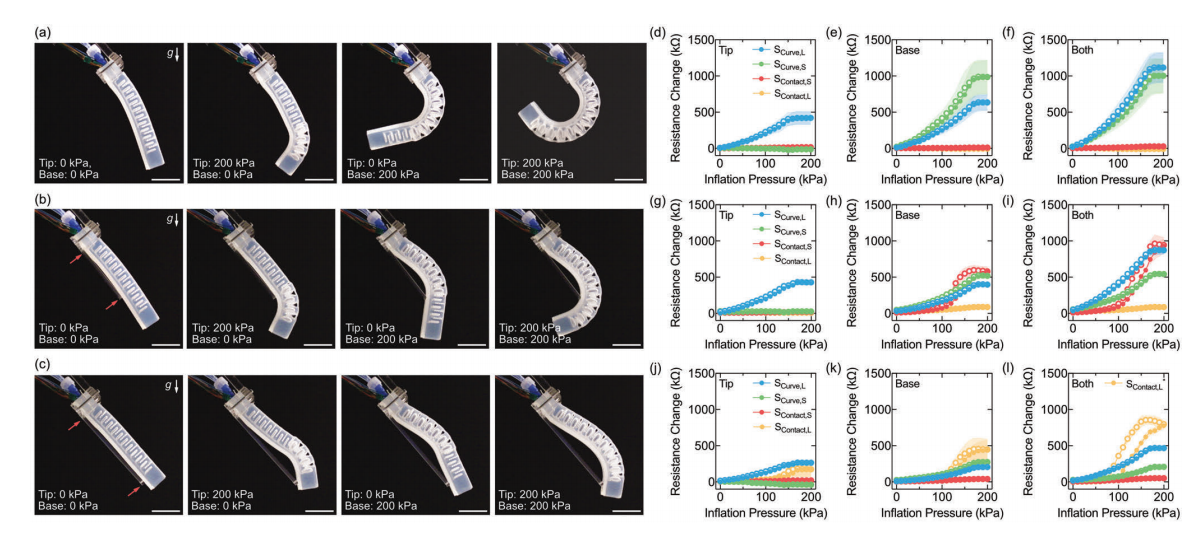
Free and blocked displacement characterization of soft sensorized fingers. (a-c) Photographs of a soft finger in non-inflated (left) and various maximum inflation states for tip (center-left), base (center-right), and full (right) actuation modes during (a) free displacement and blocked displacement with the (b) short and (c) long mounts, whose edges are indicated by the red arrows. Scale bars represent 25 mm; g indicates acceleration due to gravity. (d-l) Resistance change, ∆RS, versus inflation pressure is provided during inflation-deflation cycles (indicated by filled/open circles, respectively) for the long (SCurve,L) and short curvature (SCurve,S) and short (SContact,S) and long contact (SContact,L) sensors during (d-f) free displacement and blocked displacement with the (g-i) short and (j-l) long mounts. Plots correspond to ∆RS during (d, g, j) tip, (e, h, k) base, and (f, i, l) full-finger actuation. In (l), ∆RS for SContact,L is scaled by a factor of 0.2 (to idenically scale axes across subfigures). (n = 3, error envelopes represent standard deviation.)
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
Inside Decibel’s Collaboration with SKYLRK at Coachella 2026
There’s a version of Coachella most people never see. Not the stage. Not the crowd. Not even the music. It’s everything built around it: the spaces where artists host, brands...
Caracol to Build Large-Format 3D Printing Hub in Milan With Designtech & LAMÁQUINA
In the 1990 classic in economic strategy, The Competitive Advantage of Nations, business theorist Michael Porter wrote, “Most commentators on the Italian economy have persistently underestimated Italy, because they have...
Why Kyle Bass Is Betting on Divergent, and What It Says About the Future of Manufacturing
Kyle Bass has spent much of his career looking at big economic trends before everyone else does. The founder of Hayman Capital Management became famous for betting against the U.S....
Beyond Thermoplastics: Why JuggerBot Is Betting on Hybrid AM
For years, thermoplastics have been the workhorse of additive manufacturing (AM). They are pretty easy to process, available, and compatible with many of today’s industrial 3D printers. From prototypes to...