
Spiderhand Device Addresses Mobility Disorders with 3D Printing


Lehigh University offers a summer Mountaintop Program in a former Bethlehem Steel research building where students are brought together to freely explore open-ended questions that wander across the disciplinary landscape. Student Daniel Levy is part of a research team in the program, along with  Jeff Peisner, Elena Ramirez, Emily Macmillan, and Nan He, and has returned this year to continue working on the development of exoskeleton devices aimed at different aspects of physical rehabilitation. So far, the team has created four such devices, one of which is called The Spiderhand. As is so often the case, the inspiration for the design came about after a personal encounter.
Jeff Peisner, Elena Ramirez, Emily Macmillan, and Nan He, and has returned this year to continue working on the development of exoskeleton devices aimed at different aspects of physical rehabilitation. So far, the team has created four such devices, one of which is called The Spiderhand. As is so often the case, the inspiration for the design came about after a personal encounter.
“As I learned more about what had been accomplished last summer and what could be accomplished this summer,” Levy explained, “I saw the immediate help I could provide to a friend. One of my soccer teammates, who is also my best friend’s brother, suffered a spinal injury a few years ago and he has been struggling to regain hand function ever since. One of the most memorable experiences, and a major motivation for this project, was when I went to give him a friendly handshake to say hello and all he could do was lift up his hand to offer a fist bump.”
 Carrying over from research done last summer on tenodesis motion, which uses the flex and extension of the wrist as a mechanism for moving and curling the fingers, Levy wanted to create a device that would help a user to pick up an object that they would not otherwise have the strength to grasp. In an interview with 3DPrint.com, Levy explained the approach to his design:
Carrying over from research done last summer on tenodesis motion, which uses the flex and extension of the wrist as a mechanism for moving and curling the fingers, Levy wanted to create a device that would help a user to pick up an object that they would not otherwise have the strength to grasp. In an interview with 3DPrint.com, Levy explained the approach to his design:
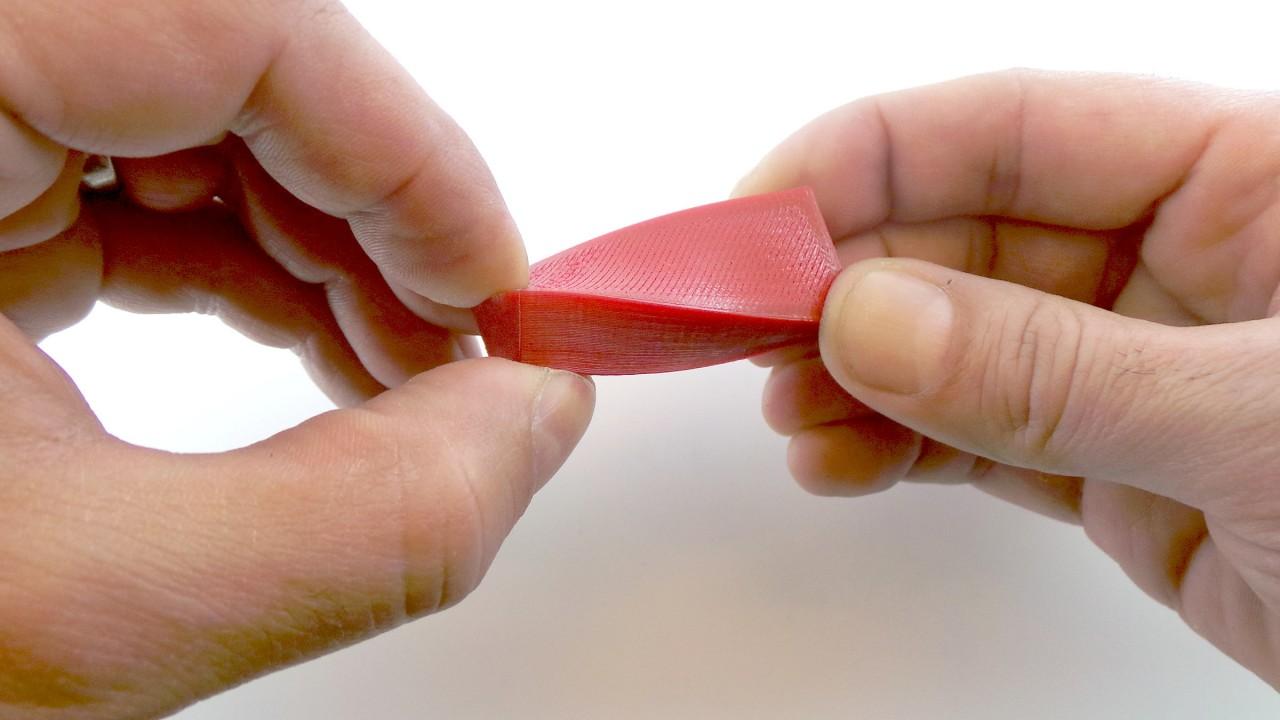
“Just by watching my wrist move up and down, I noticed that the distance between my forearm and first joint on my finger decreased as I lifted my wrist up. This got me thinking that maybe I could ‘push’ the fingers down with a rod attaching straight from my wrist to my fingers. I made a quick mock up in SolidWorks and printed it out within a few hours (oh the wonders of 3D printing!). After I proved my theory, I dove into the design.”
Levy established three parameters for his design: customizable, comfortable, and low profile. Currently, he feels that he has addressed the first two of those parameters fairly well, but that there is still quite a way to go before it can satisfy the requirement of being low profile. While some of the customization is practical, not everybody will want the same aesthetic and could really get quite creative.
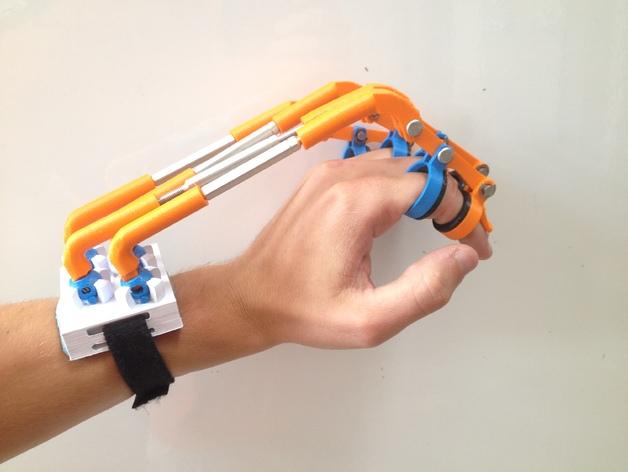
“The hand can be customized in two ways. First the metal rods can be twisted to adjust the length between the forearm piece and the finger piece. They have an adjustable range of 2″, making it suitable for almost any hand size and each finger can be adjusted separately. the second is the ninjaflex collars that fit the fingers. These collars can be taken out individually and resized and reprinted, without having to reprint the whole hand,” he explained.
 Throughout the design process, he has gotten invaluable feedback from his teammate who has tried on and tried out a number of iterations of the design. After each test, Levy returned to the model to make modifications and, because of the speed of 3D printing, was able to arrive at a highly developed prototype within the ten-week time boundaries set by the Mountaintop Program. His progress was also helped by a $1,500 budget provided with the program as well as the equipment the space has on hand.
Throughout the design process, he has gotten invaluable feedback from his teammate who has tried on and tried out a number of iterations of the design. After each test, Levy returned to the model to make modifications and, because of the speed of 3D printing, was able to arrive at a highly developed prototype within the ten-week time boundaries set by the Mountaintop Program. His progress was also helped by a $1,500 budget provided with the program as well as the equipment the space has on hand.
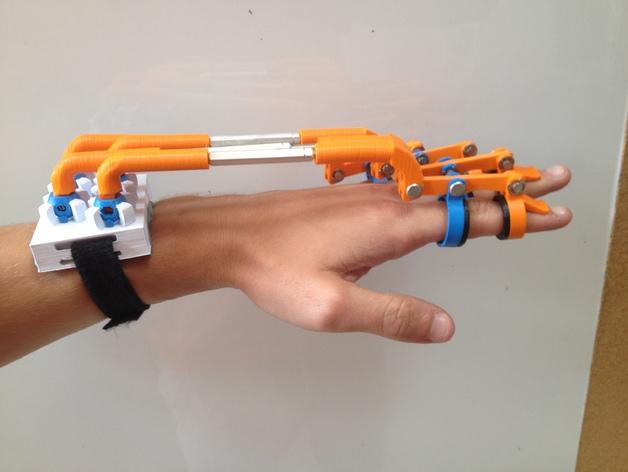
“The Mountaintop Program provided several Makerbot Replicator 2 and Ultimaker 2 machines,” Levy says. “All pieces besides the collars, which are the pieces in contact with the fingers were made on the Ultimaker 2. The collars, which were made from Ninjaflex, were made with the Makerbot Replicator 2 because that was the only printer that had Ninjaflex. Some of the pieces were made with 100% infill to increase strength, making the total print time for all the pieces around 18-20 hours maximum.”
 This type of assistive prosthetic could be extremely helpful to anyone who is suffering from diminished mobility in their hands. Levy envisions those who have suffered from a stroke as being particularly aided by the use of a device such as his. Stroke victims or those who have suffered spinal injuries often heal from their torsos out. In other words, they regain movement in their shoulders first, then elbows, followed by wrists and last in their fingers. Many never recover full use of their fingers and it is exactly this issue that Levy hopes to address with his device, as he says:
This type of assistive prosthetic could be extremely helpful to anyone who is suffering from diminished mobility in their hands. Levy envisions those who have suffered from a stroke as being particularly aided by the use of a device such as his. Stroke victims or those who have suffered spinal injuries often heal from their torsos out. In other words, they regain movement in their shoulders first, then elbows, followed by wrists and last in their fingers. Many never recover full use of their fingers and it is exactly this issue that Levy hopes to address with his device, as he says:
“There are two main uses for this design. The first is a functional use, where the device will enable a person to grasp an object they otherwise did not have the finger strength to pick up. The second is for at home rehabilitation use, where the person will wear the device and repeat the wrist motion many times over. This repetitive rehabilitation is based on the idea of neuroplasticity, where repetitive assisted motion will generate new connections in the brain and eventually allow the person to move their limbs unassisted.”
 Levy’s hopes are to be able to get the device in the public eye in any way that he can and into (and onto) the hands of the people who need it so that they can use it and also so that they can provide feedback to help him improve the creation. His first step has been to put the files for its creation on Thingiverse where it is sure to receive the attention of the Maker community.
Levy’s hopes are to be able to get the device in the public eye in any way that he can and into (and onto) the hands of the people who need it so that they can use it and also so that they can provide feedback to help him improve the creation. His first step has been to put the files for its creation on Thingiverse where it is sure to receive the attention of the Maker community.
“My vision is to have these open-sourced to everyone and also have a website/email where people can contact me and I can sell them a custom design if they would prefer. It would be awesome to have an exoskeleton line where my design along with my teammates’ designs can be downloaded or custom built,” Levy explains. “In the meantime…I have a business called Lehigh Biltong where we make South African style beef jerky.”
Admitting that he slipped that in as a shameless plug, I thought it only right for someone who was making such efforts to do so much good to have a bit of attention. After all, the more beef jerky he sells, the more filament he can buy. What are your thoughts on this enterprising student’s endeavors? Let us know in the 3D Printed Spiderhand Mobility Assist forum thread over at 3DPB.com.
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
3DPOD 302: Digital Inventory for AM with Mikhail Gladkikh, Würth Additive Group
Mikhail Gladkikh has worked in oil and gas for many years. With this background, we obviously talk about energy market turbulence and the adoption of AM in oil and gas....
Spectrum Filaments Gets Investment: How They Could Win in Filament
Spectrum Filaments is a long-time high-quality filament supplier based in Poland. With good tolerances, roundness, and consistency coupled with affordable pricing, the firm has been a mainstay for makers, industrial...
NX Atomics and Sciaky Collaborating to 3D Print Nuclear Components
For decades, the nuclear industry has quietly experimented with and implemented additive. Bouyed by the likes of ORNL, companies such as Westinghouse have 3D printed components serially. We have an...
Incodema3D Buys 14 Metal EOS Systems, Now One of the World’s Largest Metal 3D Printer Operators
Recently, a majority stake of 3D printing service bureau Incodema3D was purchased by AFM Capital. Under new ownership, the Freeville, New York company is now using its cash-rich parent for...































