The Venerable Bristlebot Gets a 3D Printed Update – Droobot

 If you’re not familiar with them, bristlebots or brushbots are extremely simple versions of walking robots, and they’ve become increasingly popular projects at school science fairs. These rigid-bodied robots feature a lower surface covered with bristles very much like a brush. The bristles are often oriented away from vertical to allow for a resulting “forward” direction as the robot is driven by a vibrating body.
If you’re not familiar with them, bristlebots or brushbots are extremely simple versions of walking robots, and they’ve become increasingly popular projects at school science fairs. These rigid-bodied robots feature a lower surface covered with bristles very much like a brush. The bristles are often oriented away from vertical to allow for a resulting “forward” direction as the robot is driven by a vibrating body.
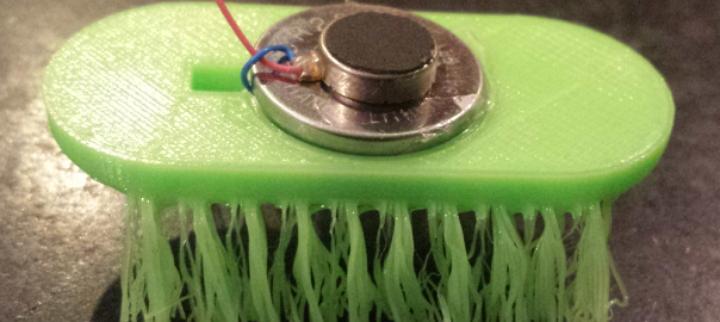
Most bristlebots are driven by tiny electric motors and batteries and feature cell phone vibrate motors from scrap devices. Most of the DIY bristlebots feature just three functional parts: a toothbrush or bristle head, a vibrate motor, and a lithium coin battery cell.
Now Kevin Osborn, who describes himself as a 30+ year veteran of the computer industry and an independent consultant engaged in software development, electronics and product prototyping, and maker workshops, has built a 3D printed update of the bristlebot and shared the results on his blog, baldwisdom.com. He calls them Droobots, and he’s also included details of the build in the video embedded here, and the full source code for the project his located here.
Osborn says that he was originally inspired by the work of Mark Peeters, a designer who came up with a clever idea for making lacy fibrous flowers with a 3D printer. He say he was impressed that the method took “advantage of FDM’s greatest weakness: the need to support overhanging structures.”
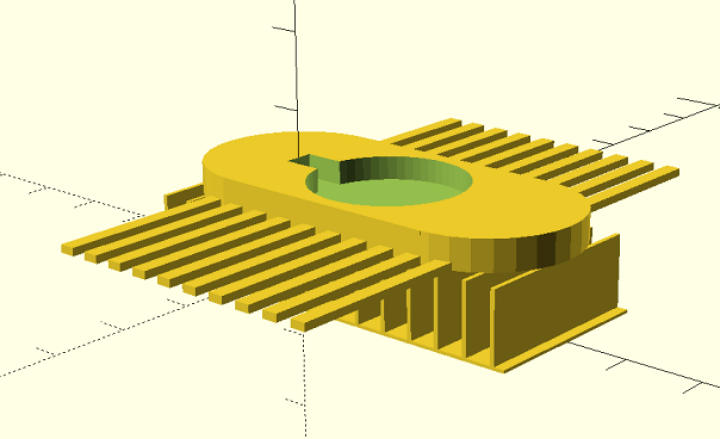
As he examined Peeters’ flowers, he says it occurred to him that a version of them might make perfect bristles, so he used OpenSCAD and Cura to design a simple bot. 
He says that to make the bristle legs print correctly, the trick is to provide a center support in the design file which will let the “bristles” droop down.
“It’s tricky if you make the support walls [too] thin, the slicer may ignore them. Too thick and it’s harder to remove. This version works fairly well, but is a little too heavy for my taste,” Osborn says. “I use Cura, and I was thinking about how to use [its] native support which is very thin and easy to remove. There is an option for printing support material only when there is an overhang on the baseplate. I put thin (.4mm) rectangles under the legs, but not under the body. This works out quite nicely, and gives a speedier print.”
He adds that another tip which proved useful is to turn off the printer’s fan as the legs are being created.
“After printing, I use a hot air gun to soften the legs to press them down more to a right angle. This give a more energetic movement than the splayed legs right off the printer,” he says. “You can also experiment with trimming them with scissors.”
What do you think of this modified Bristlebot from Kevin Osborn? Will you print one out to impress the kids? Let us know in the 3D Printed Bristlebot forum thread on 3DPB.com.
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
You May Also Like
Human Remains Could Be Identified with the Help of Forensic 3D Printing
I’m still in awe at what additive technologies can accomplish, from creating alternative meats, automotive parts, shoe insoles, and surgical models, to giving faces to the lost. That is to...
3D Printing News Briefs, May 17, 2023: Stress-Resistant Alloy, 3D Printed Trophies, & More
In today’s 3D Printing News Briefs, we’re starting off with a little research, as materials scientists developed a 3D printing process that produces an extremely stress-resistant alloy. Moving on to...
On the Ground with COBOD Construction 3D Printing at Ohio State
This winter, The Ohio State University’s Center for Design and Manufacturing Excellence (CDME), which is one of the country’s largest additive research groups, received a COBOD BOD2 3D construction printer...
3D Printing Webinar & Event Roundup: April 2, 2023
You can breathe easy this week, because it will be much less hectic than last week, at least in terms of 3D printing webinars and events to attend! There will...