Rice University Researchers Develop a New 4D Printing Method to Create Shapeshifting Materials


Researchers at Rice University‘s Brown School of Engineering created a new method to 3D print objects that can be manipulated to take on alternate forms when exposed to changes in temperature, electric current, or stress. Referred to as “reactive 4D printing,” it separates the printing and shape programming steps used in other 4D printing techniques to provide access to a broad range of architectures and virtually arbitrary shape changes.
Developed by Rafael Verduzco and engineering graduate student Morgan Barnes at the Verduzco Laboratory, at Rice’s Department of Chemical and Biomolecular Engineering, the method shows a lot of promise in applications like biomedical devices and soft robotics, areas with a growing interest in active materials that can respond to external stimuli by undergoing reversible shape changes. Using 4D printing allows objects to be previously programmed to react to a range of different stimuli, thereby changing their shape over time.

Rafael Verduzco and Morgan Barnes at the Lab (Credit: Jeff Fitlow/Rice University)
According to Rice, the researchers first reported their ability to make morphing structures in a mold in 2018 after creating a rubbery, shape-shifting material that transforms from one sophisticated geometry to another on-demand. However, using the same chemistry for 3D printing limited structures to shapes that sat in the same plane, which meant that no other complex curvatures could be programmed as the alternate shape.
“Overcoming that limitation to decouple the printing process from shaping is a significant step toward more useful materials,” said Verduzco, who is also an associate professor of Chemical and Biomolecular Engineering and of Materials Science and Nanoengineering. “These materials, once fabricated, will change shape autonomously. We needed a method to control and define this shape change. Our simple idea was to use multiple reactions in sequence to print the material and then dictate how it would change shape. Rather than trying to do this all in one step, our approach gives more flexibility in controlling the initial and final shapes and also allows us to print complex structures.”
The aim of the study Reactive 3D Printing of Shape Programmable Liquid Crystal Elastomer Actuators published in the American Chemical Society journal ACS Applied Materials and Interfaces was to decouple the printing and shape-programming steps to achieve virtually arbitrary shape-changes in 3D printed liquid crystal elastomers (LCEs), a promising material for soft robotics and actuators.
In their paper, Verduzco and Barnes—along with co-authors Rice graduate student Seyed Sajadi, Rice research scientist Muhammad Rahman, Rice professor of Chemistry Pulickel Ajayan, and Shaan Parekh, a student at John Foster Dulles High School in Sugar Land, Texas—described their new method for producing materials with complex architectures that would be otherwise difficult or impossible to print using traditional printing methods and could be useful for a wider 3D printing community.
The authors described in the study that “4D printing is inherently more complex than 3D printing because it requires simultaneously printing a structure and defining or programming a shape-response in the resulting material.” Using known methods of 4D printing, “complex shape changes can be achieved by printing along predefined paths that elicit localized out-of-plane bending.” However, these approaches “significantly limit the shape and/or shape response that can be produced.” In contrast, the authors claim that this new versatile 3D printing method is the key to unlocking the shape and shape responses that can be achieved.
In this case, 3D printing was performed using an Engine High-Resolution Hyrel 3D printer. The team said that their three-step printing process was tailored to satisfy several constraints in terms of materials processing, network composition, and solvent composition. As described in the study, it involved first printing the LCE precursor ink into a reactive catalyst bath to produce complex architectures. At this stage, the sample was soft but could be carefully removed from the solvent bath. Once removed, the sample was dried by heating to 80°C overnight. In the third reactive step, the sample was mechanically deformed to the desired shape and UV cured, to achieve the resulting shape-programmed LCE which was able to switch between the printed and programmed shapes when heated and cooled, respectively.
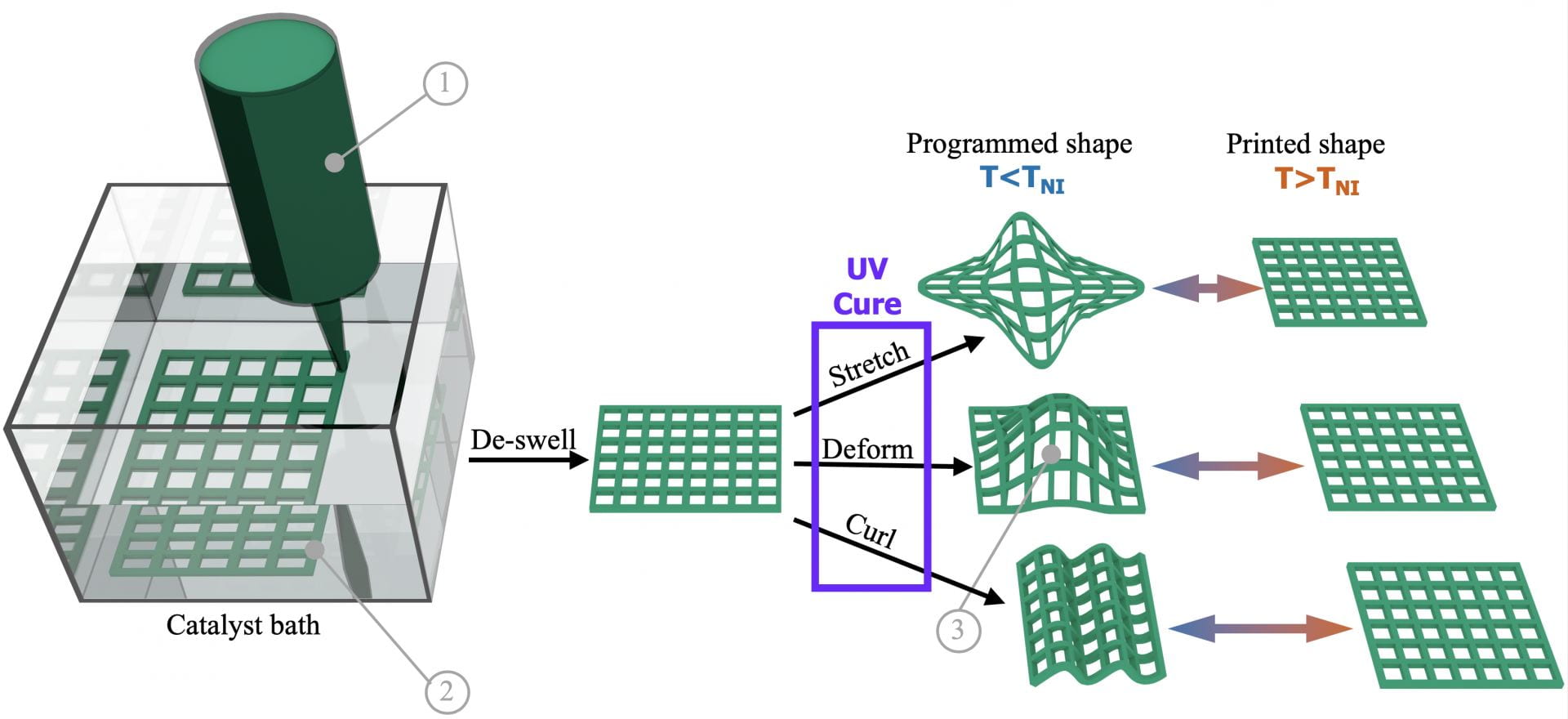
The process developed at Rice University lab that uses 3D printing to make shape-shifting materials that may be useful to make soft robots or as biomedical implants (Credit: Verduzco Laboratory/Rice University)
According to Rice, the lab’s challenge was to create a liquid crystal polymer ink that incorporated mutually exclusive sets of chemical links between molecules. As one established the original printed shape, the other could be set by physically manipulating the printed-and-dried material. Curing the alternate form under ultraviolet light locked in those links. Then once the two programmed forms are set, the material could morph back and forth when heated or cooled.
The researchers had to find a polymer mix that could be printed in a catalyst bath and still hold its original programmed shape. Barnes suggested that “there were a lot of parameters we had to optimize—from the solvents and catalyst used, to the degree of swelling, and ink formula—to allow the ink to solidify rapidly enough to print while not inhibiting the desired final shape actuation.”
Even though the team described this method as useful in the development of LCE actuators with complex architectures and shape changes, Barnes said that one remaining limitation of this printing process is the inability to create structures with unsupported printed fibers, like columns.
“To do so would require a solution that gels just enough to support itself during printing,” she stated.
Gaining that ability would allow researchers to print far more complex combinations of shapes.
“Future work will further optimize the printing formula and use scaffold-assisted printing techniques to create actuators that transition between two different complex shapes,” revealed Barnes. “This opens the door to printing soft robotics that could swim like a jellyfish, jump like a cricket or transport liquids like the heart.”
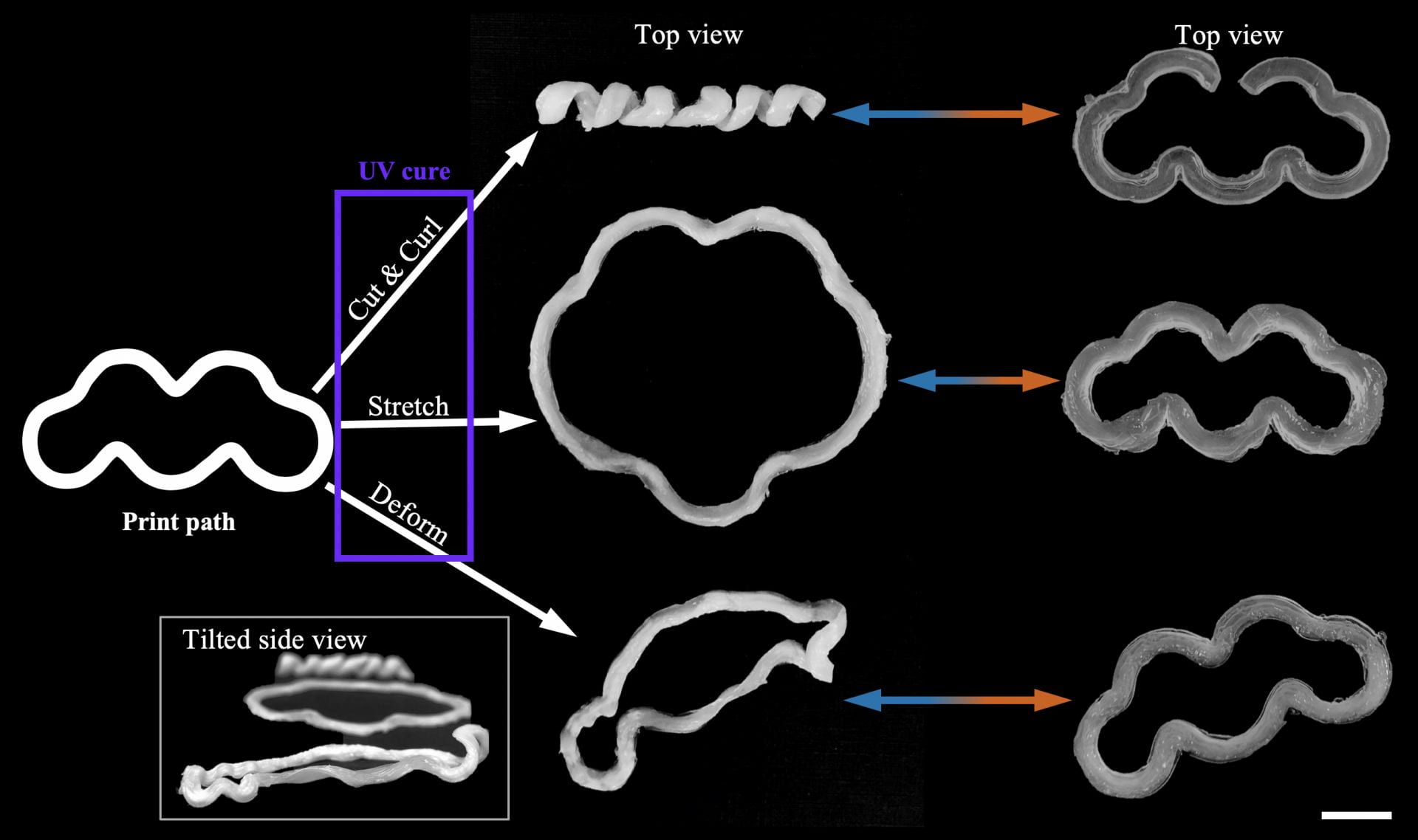
This example shows how one printed configuration can be programmed to take various shapes (Credit: Verduzco Laboratory/Rice University)
The potential of this method was demonstrated in the study by programming a variety of arbitrary shape-changes in a single printed material, producing auxetic LCE structures and symmetry breaking shape changes in LCE sheets. For example, the team printed and shape-programmed circular LCEs, auxetic honeycomb LCEs, and flat LCE films with divots that appear on cooling, to demonstrate the shapes and shape-changes possible with the 3D printing technique.
The first circular structure was stretched and curled to create a shape at room temperature that was circular from a side view and square from a top view, and the second was curled around three consecutive rods to create a wavy shape. Both LCEs ultimately transformed between the programmed shape and printed circle when cooled and heated, respectively. The researcher’s printed honeycomb structure was stretched bi-axially and shape programmed to create an auxetic shape-shifting material.
Supported by the Welch Foundation for Chemical Research and the Army Research Office Chemical Sciences Division, the research suggests that the team was able to demonstrate a reactive 3D printing method for LCEs that enabled straightforward programming of complex shape changes in printed soft actuators. In short, reactive 3D printing of LCEs could open opportunities for architectural freedom and virtually arbitrary shape changes in soft robotic systems and much more.
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
Desktop UV Printers & 3D Printing: Collision Course
UV printing has been around for ages, of course. But, since a few years ago, desktop UV printers have made their way into households, small businesses, and enterprises. These machines...
3D Printing News Briefs, June 24, 2026: Name Change, Digital Foundry, & Yeast
In today’s 3D Printing News Briefs, we’re starting with a formal name change for an African industrial technology company that’s a major user of additive manufacturing (AM) in the oil...
Fabri Raises $13.5 Million to Create Digital Foundry
Fabri is a startup that wants to create a “digital foundry,” and just raised some funds to help it reach this goal. There are far too few foundries in America....
Flashforge Unleashes Wax 3D Printer
Flashforge has released a wax 3D printer. Wax printing was pioneered by Solidscape, a company acquired by Stratasys and later sold to Prodways before being shuttered in 2024. That firm’s wax jetting...