Quebec: New Framework for 3D Printing Soft Robotics

‘Geometric Simulation and Additive Manufacturing of Multi-Material Soft Robots’ is a recent master’s thesis by Christopher-Denny Matte, a student at Concordia University (Gina Cody School of Engineering and Computer Science Mechanical, Industrial and Aerospace Engineering) in Montreal, Quebec. Matte explores the topic of soft robotics, including the need for versatility in design, and simulation.
 Soft robotics have become more accessible to scientists and student researchers today as so many strides have been made in the field, offering robots that are life-size, capable of exploring on different levels, and may also be enhanced with bionics.
Soft robotics have become more accessible to scientists and student researchers today as so many strides have been made in the field, offering robots that are life-size, capable of exploring on different levels, and may also be enhanced with bionics.
“Most common designs for soft robots are realized by distributed actuation on soft materials. With more Degree-of-Freedom (DoF) than rigid robots can provide, it can better complete highly dexterous tasks like grasping and detection of confined areas,” states Matte. “Soft robots have the unique property that their entire deformation and use case is based on its shape and material distribution. As such being able to program deformations by changing its geometry or placing certain materials in key locations is a very attractive perspective.”
The author also points out the need for several areas of research, to include:
- New methods of simulation for efficient reproduction
- Expanded fabrication techniques
- Improvements in numerical simulation and predictors
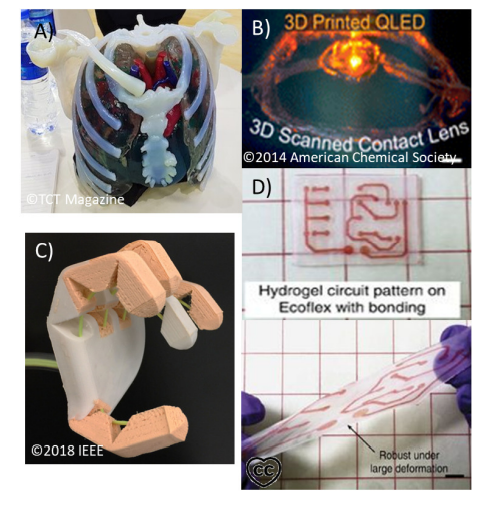
Multi-material applications: A) Physiologically accurate
rib cage [1]. B) 3D printed Quantum Dot-LED. Reprinted with permission from [2]. C) A soft robotic hand. Reprinted, with permission, from [3]. D) A conductive Hydrogel and Ecoflex circuit. CC by 4.0
- Contamination between materials
- Long material swap time
- Limited material capability
Matte was inspired by previous research using geometry-based algorithm in optimization, expanding the concepts to soft robotics and multiple materials for use in SLA/DLP printing; in fact, the use of multiple materials within robotics (with anthropomorphic hands, for instance) is becoming more common—offering ‘unique compliance and performance’ of critical elements like joints and actuators.
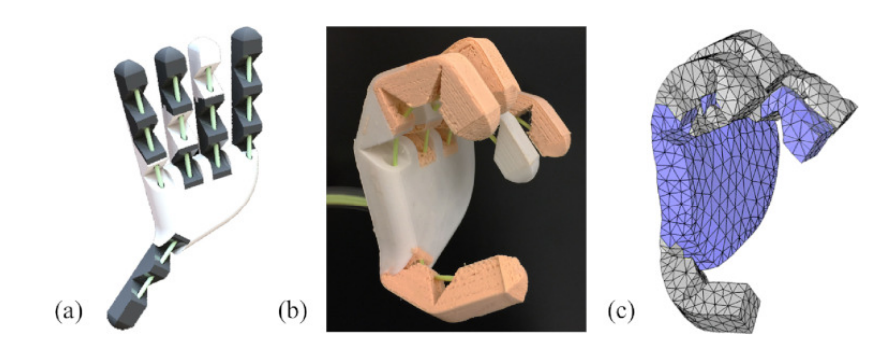
A cable-driven soft hand with multiple materials. (a) The digital model designed with different material compositions on different fingers. (b) The actuated physical model fabricated by 3D printing, and the fingers have different shapes under the same actuation. (c) The simulation result generated by the proposed method.
“From prototypes to end products, it can be seen that the technology is being applied to various fields, from organs to airplane parts,” states Matte.
Multi-material printing for SLA/DLP is still relatively limited though, generally either causing a slowdown in production or challenges in changing the materials.
“To realize the framework, three research questions need to be investigated: 1) How to convert the mechanical analysis to a geometric problem, 2) How to apply different actuations in the simulation, and 3) How to model the material properties geometrically,” states Matte.
These questions are answered with 1) geometric optimization, 2) modeling by a type of element for geometric constraints, 3) a calibration method for understanding the connection between materials and shape parameters. Matte found that the novel framework did offer better results in accuracy, along with the use of multiple materials.
For this study, the framework is geared around cable-driven and pneumatic-driven soft robots, but Matte explains that the framework can also be refined in the future for other actuations. In terms of 3D printing, there are still more improvements to be made.
“DLP brought its own set of challenges such as contamination between materials, the swapping process since complete vats need to be displaced, as well the number of materials per print and the overhead time for dealing with multiple materials. The problem with contamination was addressed by utilizing a more active cleaning approach using jets of cleaning agent,” concluded Matte. “While the swapping of materials and the inherent time loss was addressed by adapting classical automated storage and retrieval systems to a DLP printer, this led to a 3x speed increase for the total system, while dealing with a print area that is 12x larger than the previous solutions.
“Further development of the DLP method, as well as new materials being created will allow for limitless designs and accurate reproduction of the digital model. Due to this, innovation can continue in terms of exploration robots which can deal with more situations, more realistic and complex prosthetics, as well as mechanically programmed compliance for dexterous tasks.”
Soft robotics continues to be a significant area of interest for researchers, from the development of new metamaterials to unique customization to the use of color-based sensors. What do you think of this news? Let us know your thoughts! Join the discussion of this and other 3D printing topics at 3DPrintBoard.com.
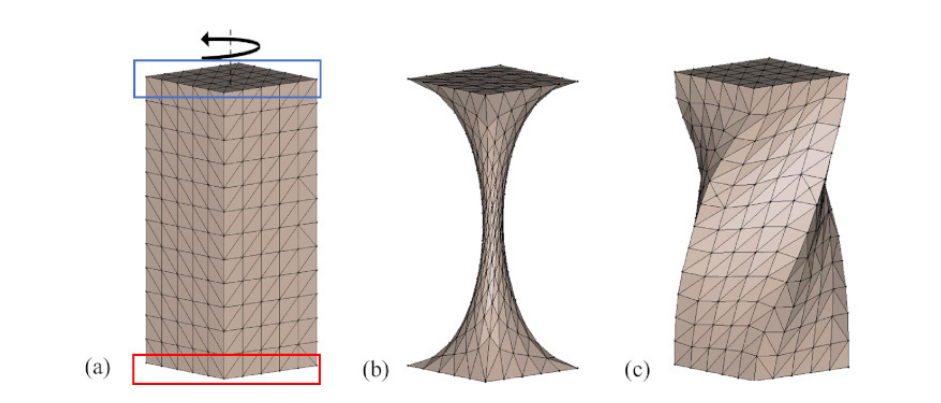
(a) A bar is being twisted by 90◦. (b) The result without preserving its shape looks unreal. (c) By preserving the original shape of each element, the numerical simulation can mimic the physical phenomenon.
[Source / Images: ‘Geometric Simulation and Additive Manufacturing of Multi-Material Soft Robots’]
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services







You May Also Like
Low-cost “Suzy” Polymer Powder 3D Printer is Faster and Cheaper than Past Models
Polish laser powder bed fusion (LPBF) firm Sinterit has released a follow-up to its predecessors, Lisa and Nils, called Suzy, a $19,490 printer equipped with a 30W fiber diode laser....
India’s $58M Space Fund Is a Boon for AM Innovation
India’s space industry is picking up serious momentum. With a projected $44 billion space economy by 2033, the country is aggressively expanding its capabilities, fostering private-sector participation, and reducing its...
Japanese Advanced Manufacturing Capabilities Grow in Europe with Sodick’s Purchase of Prima Additive
The global economy is currently undergoing a reshuffling in terms of what gets manufactured where. In large part, this trend is being driven by new geopolitical alliances and the need...
Bosch Invests €6M into Serial Auto Part 3D Printing
German industrial conglomerate Robert Bosch GmbH, the world’s largest supplier of automotive parts, has announced a new investment into Nuremberg, Germany additive manufacturing (AM) facility. The nearly €6 million in...