
3D Printed Cellular Fingers Offer Material Balance Required for Modern Robotics


In ‘Toward a Smart Compliant Robotic Gripper Equipped with 3D-Designed Cellular Fingers,’ authors Manpreet Kaur and Woo Soo Kim delve into the world of combining 3D printing and robotics. Their recently published paper focuses on the design of a robotic structure with deformable cellular structures that are easy to fabricate.
The conventional metal robot or robotic components are increasingly being upstaged by softer materials that offer more versatility for industrial applications. Not only that, many of these new materials are able to morph to their environment, affected by environments such as temperature or moisture. Kaur and Kim remind us that many of these innovations are originally inspired by nature, such as the movement of and the frictional properties of the snake.
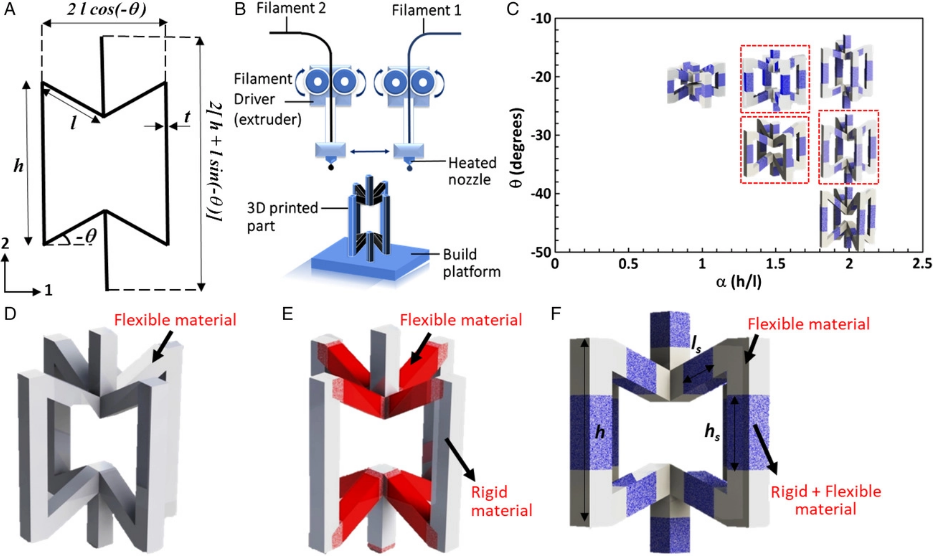
Design and fabrication of multi‐material auxetic structure: A) 2D sketch of the re‐entrant honeycomb unit cell with defined parameters. B) Schematic demonstration of filament extrusion–based multi‐material 3D printing. C) Different designs of auxetic unit cells with two important parameters, α (the ratio of length of vertical strut h by re‐entrant strut l) and θ (the re‐entrant angle), defined in the sketch (A). D) The CAD image of the 3D re‐entrant honeycomb structure made by joining two 2D structures at 90°. The single tone gray color indicates the usage of a single material that is a TPU‐based flexible material. E) A dual‐material‐based auxetic unit cell where the re‐entrant struts (red) made of flexible material and the vertical struts (gray) made of rigid material. F) Different designs of dual‐material‐based auxetic unit cell, where the joints (gray) are made of flexible material and the rest of the portion of the struts (blue) are printed with the combination of both flexible and rigid material with equal proportion.
In creating soft robotics, however, there is the challenge of finding a balance between flexibility and structural stiffness and incorporating electronics which usually consist of a variety of different bulky systems. The cellular finger noted in this research can be made with embedded sensors in the fingertips, allowing for a significant gripping force of 16N, and the ability to pick up numerous objects—and acting as an example of more complex architectures for better functionality and performance overall.
“Stretching‐dominated cellular solids, such as octet, octahedral, and so on, show higher initial yield strength compared with bending‐dominated foamed materials, which is due to their different layout of structural components and makes them better alternatives for lightweight structural applications. One such unique spatially arranged structure produces a negative Poisson’s ratio (NPR); these are called auxetics. Like other types of mechanical metamaterials, the NPR of auxetics is generally a direct consequence of the topology, where the joints rotate to move the structure,” state the researchers.

Characterization of 3D printed auxetic structures: A) Compressed samples from the design with α = 1.5 and θ = −20°. Three different material distributions in the unit cell (single, dual 1, and dual 2 designs) are studied. Images were captured for each sample at 0%, 20%, and 40% strains. B) Stress–strain graph of three samples with different combinations of α = 1.5, 2 and θ = −20°, −30 ° for designs (single, dual 1, and dual 2). The legends read as “a” for alpha, “t” for theta, and S, D1, D2 for single, dual 1, and dual 2, respectively. C) Finite element analysis (FEA) simulation analysis of compressed auxetic unit cell to study the different stress distributions in the elastic region for the three different designs. The color code is kept constant and is defined next to each image. The corresponding elastic curves from experiment and simulation are compared for each case. D) The cellular finger is designed using the rigid stretching‐dominated octet structure for the main body and using chosen auxetic structure (α = 1.5 and θ = −20°) with dual 2 designs for the joints.
NPR materials are also able to deform and show ‘compliant-bending behavior.’ In this research project, Kaur and Kim used honeycomb structures—again, inspired by nature—examining their ability to absorb energy and bend. These re-entrant structures are more easily translated to the 3D realm and allowed the authors to experiment regarding parameters and resulting cell properties. The end goal was to achieve deformity, along with suitable durability and energy efficiency.
With the use of porous cellular materials meant to meet the balance of both softness and flexibility and the need for firmness also, the researchers were able to roll their knowledge of materials, manufacturing, and robotics into one—along with 3D printing and the use of triple materials. The robotic gripper finger was made up of the following lightweight parts:
- Three octet segments
- Two auxetic joints (mimicking human bones and joints)
- Integrated pressure sensor on the fingertip
The following materials were used for 3D printing the single, dual 1, and dual 2 designs: SemiFlex, PLA, and carbon fiber reinforced PLA (CFRPLA). The porosity level allowed for the sought-after balance in a lightweight structure as well as offering the proper rigidity for various gripping functions. The overall design was also responsible for the system of fingers able to deform as needed, in tune with objects and their specific shapes—while the fingertip sensors monitoring the environment.
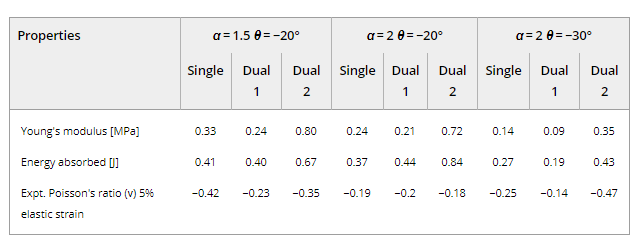
Mechanical properties of the samples from compression test
“Our architectured robotic finger is a starting point of cellular design concept. Therefore, there is a lot of room for further research in this topic. Design of other mechanical metamaterials has lots of opportunities, so other lattice structures can be investigated to tune additional mechanical deformation functionality in the robotic finger,” concluded the researchers.
“The optimization of sensor design and addition of other sensors can also be investigated to achieve its ubiquitous performance. This compliant robotic design with metamaterial body can prove to enhance the functionality and durability of robotic bodies for prosthetic or industrial applications, thus developing new generation of robotic systems with better performance and greater adaptability in a variety of tasks.”
Robotics and 3D printing are paired up often these days, in projects ranging from uses in furniture manufacturing to soft robotics, and more. What do you think of this news? Let us know your thoughts! Join the discussion of this and other 3D printing topics at 3DPrintBoard.com.
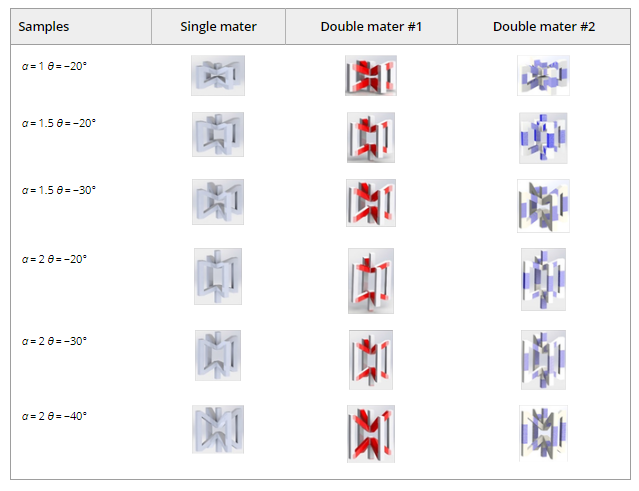
Auxetic unit cell designs based on different α and θ parameters
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
How One Artist Is Using 3D Printing to Tell Stories About the Ocean
Artist Kimberly Callas sees something different when she looks at a 3D printer. Where others see a machine for making parts, she sees a way to tell stories about the...
Bambu Lab Wants Home 3D Printing to Feel Less Like a Workshop with PLA Pure
As desktop 3D printers become increasingly common in homes, Bambu Lab is focusing attention on something beyond print speed and hardware features. This week, the company launched a new filament,...
AM Asia Watch: China Exported 2.46 Million 3D Printers in Four Months
China’s consumer 3D printer industry seems to be reaching a new level of global dominance. According to Chinese state media outlet China Global Television Network (CGTN), China exported 2.46 million...
Bambu Launches A2L: What the New Printer Reveals About Its Strategy
Bambu Lab continues its relentless march for 3D printing domination with the launch of the A2L. The 330 × 320 × 325 mm printer will have a nozzle temperature of...































