
TU Delft: 3D Printing Soft Mechanical Materials for Ultra-Programmable Robotics


![]() TU Delft scientists continue to delve into 3D printing research, recently developing advanced robotics in the form of highly programmable—and soft—actuators. Fabricated with both hard and soft materials, the actuators are capable of complex movements that the researchers see as promising for robots that will be able to handle ‘delicate’ objects as well as work with humans.
TU Delft scientists continue to delve into 3D printing research, recently developing advanced robotics in the form of highly programmable—and soft—actuators. Fabricated with both hard and soft materials, the actuators are capable of complex movements that the researchers see as promising for robots that will be able to handle ‘delicate’ objects as well as work with humans.
In the recently published ‘Ultra-programmable buckling-driven soft cellular mechanisms,’ authors S. Janbaz, F.S.L. Bobbert, M. J. Mirzaali, and A.A. Zadpoor explain more about their project, centered around some extremely modern robots made from metamaterials that are not only flexible but also offer ‘unprecedented functionalities.’
The first author on the paper, Shahram Janbaz, explains that the materials are imbued with fabric that has great potential for soft robotics, but the tunability so far has been limited.
“We now present some new designs of ultra-programmable mechanical metamaterials where not only the actuation force and amplitude but also the actuation mode could be selected and tuned within a very wide range. We also demonstrate some examples of how these soft actuators could be used in robotics, for instance as a force switch, kinematic controllers, and a pick-and-place end-effector,” says Janbaz.
The researchers also examine how buckling—often associated with defects—has been used to create a range of mechanical metamaterials; however, these types of materials rely heavily on advanced programmability. The team created ‘rational design approaches’ with high programmability and soft metamaterials allowing for the necessary actuation force and actuation amplitude.
Researchers develop soft actuators that will provide robots with soft touch (Photo Credit: Delft University of Technology)
“The function is already incorporated in the material,” Professor Amir Zadpoor explains. “Therefore, we had to look deeper at the phenomenon of buckling. This was once considered the epitome of design failure but has been harnessed during the last few years to develop mechanical metamaterials with advanced functionalities. Soft robotics in general and soft actuators in particular could greatly benefit from such designer materials. Unlocking the great potential of buckling-driven materials is, however, contingent on resolving the main limitation of the designs presented to date, namely the limited range of their programmability. We were able to calculate and predict higher modes of buckling and make the material predisposed to these higher modes.”
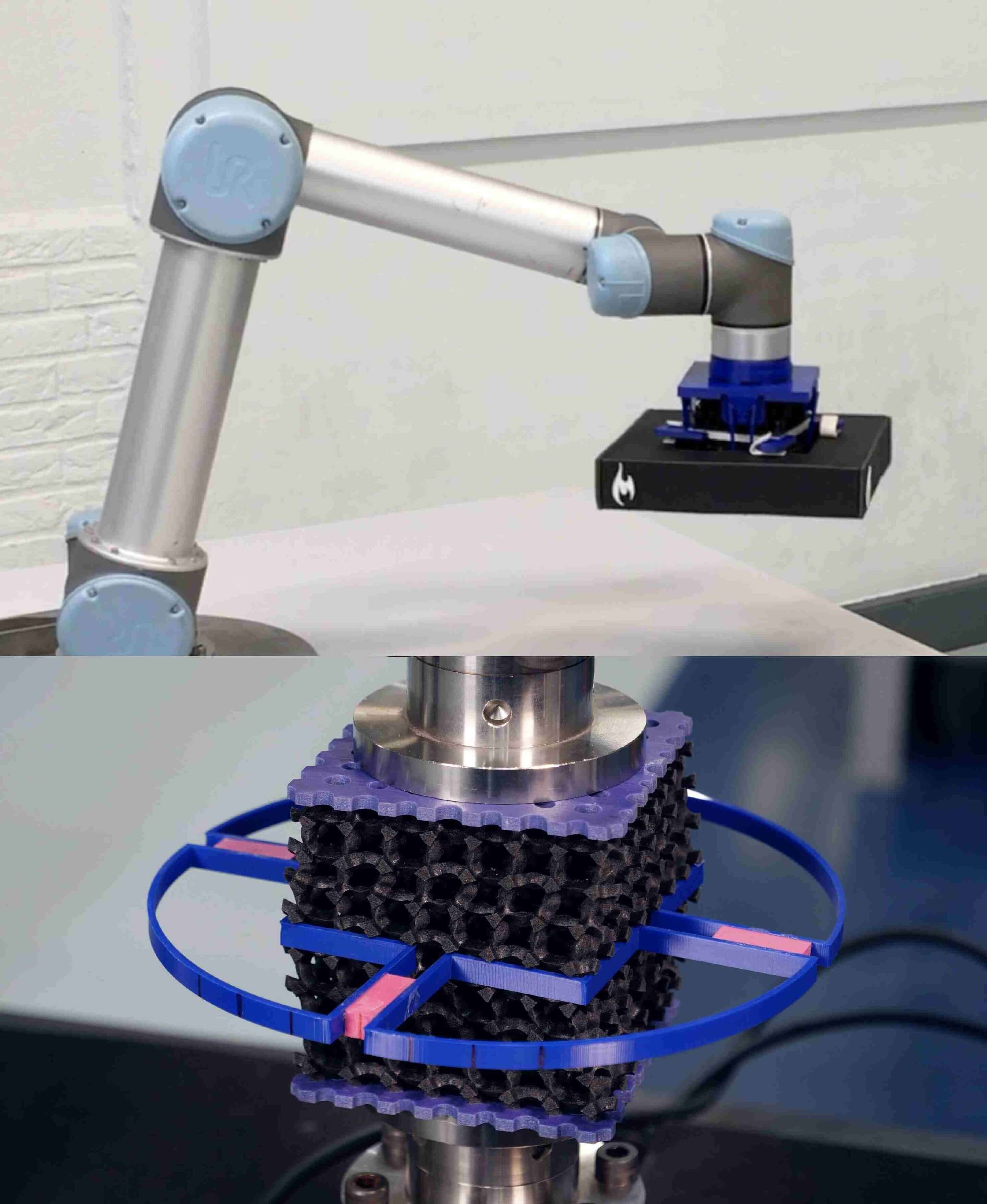
A conventional robotic arm is modified using the developed soft actuators to provide soft-touch during pick-and-place tasks. Credit: Delft University of Technology
The designs in the study also involve double-sided buckling, which the researchers refer to as the new ‘lowest instability mode.’ They also include an approach for ‘pre-disposing’ the soft mechanical metamaterials to actuate higher instability modes—and without reliance on other boundaries. The team worked together to create a cellular mechanism with a rotational buckling pattern—demonstrating functionality as a force switch, kinematic controllers, and a pick-and-place end-effector.
“So, we present multi-material buckling-driven metamaterials with high levels of programmability,” says Janbaz. “We combined rational design approaches based on predictive computational models with advanced multi-material additive manufacturing techniques to 3D print cellular materials with arbitrary distributions of soft and hard materials in the central and corner parts of their unit cells. Using the geometry and spatial distribution of material properties as the main design parameters, we developed soft mechanical metamaterials behaving as mechanisms whose actuation force and actuation amplitude could be adjusted.”
“What you really want, is something resembling the features of the human hand including soft touch, quick yet accurate movements, and power,” said Professor Zadpoor. “And that’s what our soft 3D-printed programmable materials strive to achieve.”
Innovators at TU Delft have continued to be forerunners in 3D design and fabrication, creating items like 4D furniture that morphs according to need, stress adapted orthotropic infill, and other new processes like intent-based 3D printing. What do you think of this news? Let us know your thoughts! Join the discussion of this and other 3D printing topics at 3DPrintBoard.com.
[Source / Images: Programmable soft actuators show the great potential of soft robotics; ‘Ultra-programmable buckling-driven soft cellular mechanisms’]Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
The Drone Industry is Showing Where 3D Printing Delivers Real Value, AM Research Report Finds
The rapid rise of drones is creating one of the biggest opportunities for additive manufacturing (AM). Whether they’re used on battlefields, inspecting bridges or crops, or delivering supplies, drones need...
3D Printing News Briefs, June 27, 2026: Nanoscale 3D Printing, Defense Readiness, & More
We’re starting with a story about a grant for advanced nanoscale 3D printing in this weekend’s 3D Printing News Briefs, and then on to metal additive manufacturing (AM) for defense...
US Army Awards Continuous Composites 3D Printed Missile Component Contract
Despite the very loud, indignant claims from American defense officials that the US hasn’t depleted a significant portion of its munitions stockpiles, the US has depleted a significant portion of...
Rheinmetall Uses Ducting Made with Minifactory for Challenger 3 Tanks
Rheinmetall UK is using Minifactory Material Extusion as the primary production method for tank ducting on the Challenger 3 Main Battle Tank program. The Challenger 3 is the UK’s formidable...































