
NTU Singapore Researchers Develop Mobile 3D Printing Concrete Collaborative Robots


There’s been a lot of talk about 3D printing construction robots recently, and while we’ve seen some of these robots receive help with their task from drones, we don’t often see them working together to build structures…until now.
Large-scale 3D printing of objects, like buildings, is possible, but volume constraints and length of time can still be issues. Robot arms can be used to print anywhere within reach of the arms, and there have been some gantry systems that are able to 3D print structures, so long as the structure is smaller than it is, of course.
“The way to avoid constraints like these is to have a robot that can both 3D print things and move around, and once you’ve decided to go that route, there’s no reason not to use multiple robots to speed things along,” wrote Evan Ackerman for IEEE Spectrum.
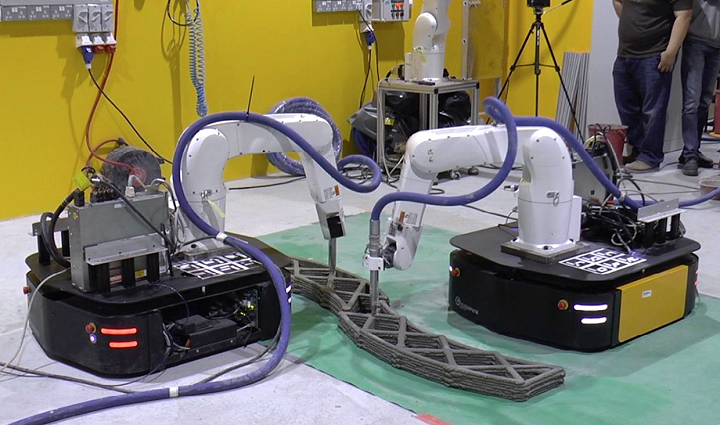
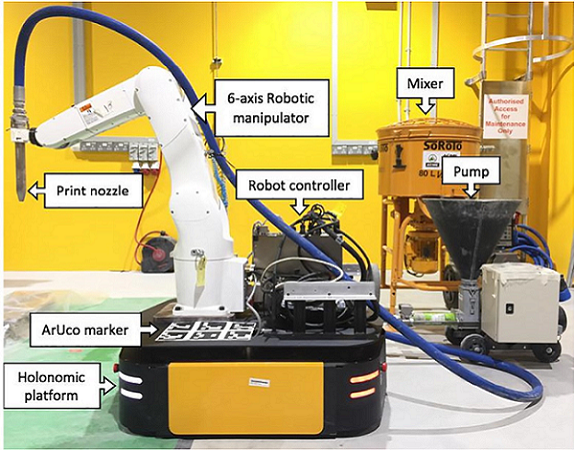
 Recently, a team of roboticists from Nanyang Technological University in Singapore (NTU Singapore) published a paper, titled “Large-scale 3D Printing by a Team of Mobile Robots,” in the Automation in Construction journal. The paper details how the researchers were able to complete the actual 3D printing, using two mobile robots operating simultaneously, of a single-piece concrete structure.
Recently, a team of roboticists from Nanyang Technological University in Singapore (NTU Singapore) published a paper, titled “Large-scale 3D Printing by a Team of Mobile Robots,” in the Automation in Construction journal. The paper details how the researchers were able to complete the actual 3D printing, using two mobile robots operating simultaneously, of a single-piece concrete structure.
The team believes they are the first to have achieved this.
The abstract reads, “Scalability is a problem common to most existing 3D printing processes, where the size of the design is strictly constrained by the chamber volume of the 3D printer. This issue is more pronounced in the building and construction industry, where it is impractical to have printers that are larger than actual buildings. One workaround consists in printing smaller pieces, which can then be assembled on-site. This workaround generates however additional design and process complexities, as well as creates potential weaknesses at the assembly interfaces. In this paper, we propose a 3D printing system that employs multiple mobile robots printing concurrently a large, single-piece, structure. We present our system in detail, and report simulation and experimental results. To our knowledge, this is the first physical demonstration of large-scale, concurrent, 3D printing of a concrete structure by multiple mobile robots.”
These aren’t drones, but instead robot arms on mobile bases. So while there are still restrictions as to how high they can reach, they are far more flexible in terms of length and width than most other systems. Additionally, since you can bring in several cooperating robots for one big project, they are a more efficient option – one robot can tackle one problem, while a second can take on another task, and so on and so forth. Multiple robots also means that you can make stronger, more complex structures at an increased rate of speed, because, as Ackerman put it, “you don’t run into the problem of trying to bond wet concrete to dry concrete where two parts intersect.”
Because the mobile robot system developed by the NTU Singapore researchers can move around and thus define its own build volume, it can actually build structures that are essentially arbitrary in size without needing to make many system changes. You can see the system in action below:
There are all sorts of applications that a fleet of moving construction robots could work on. But the team is currently looking at one in particular, as they explain in their paper:
“Using a fleet of mobile robots for construction could have an extreme potential in other non-conventional aspects. One such application is to allow automated construction in hard-to-reach, remote areas, such as underground caves, the Moon or Mars, to which it is inconvenient or even impossible to bring other kinds of machine required for existing cementitious material printing methods.”
 Currently, this system is still just an early proof of concept, so no cave construction yet. While the two robots in the video did collaborate to 3D print a structure, they’re not yet moving around during printing. Additionally, a camera array guides the robots during construction, and the existing system is not designed to be used outside…kind of a problem when you’re 3D printing a large building.
Currently, this system is still just an early proof of concept, so no cave construction yet. While the two robots in the video did collaborate to 3D print a structure, they’re not yet moving around during printing. Additionally, a camera array guides the robots during construction, and the existing system is not designed to be used outside…kind of a problem when you’re 3D printing a large building.
But fear not! Quang-Cuong Pham, one of the researchers, explained that it took the team several years to reach this point and that the work is not done yet, so these issues can be sorted out. Pham said that the mobile robotic 3D printing system has been “a multidisciplinary effort, combining both robotics and cementitious material formulation.”
When it comes to getting the robots to move during 3D printing, Pham explained that it will require “even higher precision in the localization of the base…to ensure that the layers are appropriately positioned one above the other.”
The team will also be working to add on-board obstacle (and human) detection to improve the autonomy of the robots, in addition to putting the robot arms on scissor lifts to increase their reach.
Co-authors of the paper are Xu Zhang, Mingyang Li, Jian Hui Lim, Yiwei Weng, Yi Wei Daniel Tay, Hung Pham, and Pham, all of whom are with NTU’s Singapore Centre for 3D Printing at the university’s School of Mechanical & Aerospace Engineering.
Discuss this story and other 3D printing topics at 3DPrintBoard.com or share your thoughts in the Facebook comments below.
[Images: Nanyang Technological University]Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
AM Asia Watch: Chinese Company Claims Advances in Titanium Powder Beyond 700C
They’re a familiar sight at trade shows: Chinese powder companies with barren stands lacking parts. There’s maybe some glass vessel with powder in it and a semi-complete data sheet, but...
Aires Tide Designed with AI, Supercomputers, and 3D Printing
The Department of Energy‘s National Nuclear Security Administration (DOE/NNSA) is part of the US government that manages the US nuclear stockpile, helping to upgrade, improve, and maintain nuclear weapons, and...
Largest Publicly Announced, Single Order in EOS History: Beehive Industries Spends $50M on M4 ONYX 3D Printers
Earlier this year, Beehive Industries received a $29.7 million contract to produce its Frenzy 6 and Frenzy 8 engines for the US Air Force. The metal additive manufacturing (AM) user...
Blue Origin’s New Glenn Explosion Comes During Major Manufacturing Push
Blue Origin‘s orbital New Glenn rocket exploded during a hot-fire test at Launch Complex 36 in Cape Canaveral on May 29, setting back the company’s launch ambitions at a time...
































