

Israeli Engineer 3D Prints Versatile Hexapod Robot named ‘Billy’


It’s really amazing how creative people are getting in combining the near infinite manufacturing capabilities that 3D printing has to offer with the DIY open-source physical computing platform, Arduino, which is based on a simple microcontroller board. Forgetting the fact that Arduino themselves will be entering the 3D printing space with their own printer shortly, the two technologies combined can provide an amazing toolset for some pretty amazing do-it-yourself electronics projects.

Jonathan Spitz
One such project, for a hexapod robot named ‘Billy’, is quite incredible if you were to ask me. Billy was developed by a PhD student named Jonathan Spitz at the Sensory-Motor Integration Laboratory (SMILE), headed by Assoc. Prof. Miriam Zacksenhouse. The lab is part of the Faculty of Mechanical Engineering at the Technion, Israel’s Institute of Technology.
“The main area of research at the Sensory-Motor Integration Laboratory (SMILE) is walking robots,” explained Spitz to 3DPrint.com. “During my PhD, I developed bio-inspired controllers for dynamic walking which work really well in simulation, but are hard to implement in your run-of-the-mill biped robot. Most state-of-the-art dynamic walking robots use either hydraulic actuators or series-elastic actuators. The latter are composed of DC motors in series with some elastic element that gives the joint some flexibility (which is needed to compensate for the rigidity of the motors’ gearboxes). In order to expedite the design process of prototypes that use these actuators we decided to purchase a 3D printer and start with small prototypes. Working on Billy was a good way to get some experience with mechanical design for 3D printing.”

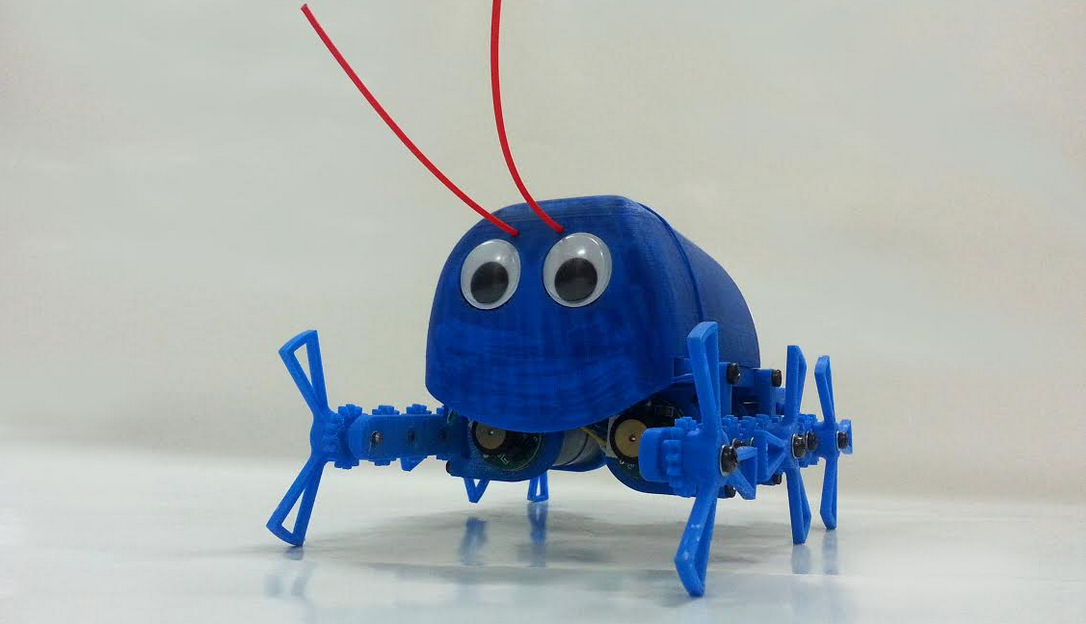
So Spitz set out to 3D print his own walking hexapod, using an UP! Plus 2 3D printer from Easy3D, ABS filament, and an Arduino Leonardo board. Before creating the robot you see in the images and video, several prototypes were first created and tested. They all featured numerous 3D printed gears and leg types, as well as a variety of rather affordable electronic components. The second prototype of the robot used ABS printed axles, which from the video below, you can see did not hold up very well to the shear stress encountered. From there he decided to use M3 screws for the gear axles which significantly reduced the friction experienced on the gears. After the forth prototype, the hexapod was walking and was ready to be fitted with the body of Billy.
The entire process, from conceptualization of Billy to the final working prototype, took just 20 days. Spitz tells us that approximately half of this time was used programming the Arduino board and waiting around for components to arrive, while the other half included designing, printing and assembling the various prototypes. As for the time it took to print the final working prototype, Spitz provided us with an estimation:
“Because most of the parts were printed with a 0.15mm resolution they take quite a while to print. The slowest part is the cover, which takes 7 hours to print. Billy’s body, which holds the electronics and connects between both leg sets, takes 4 hours to print. Each set of 3 legs takes about 3 hours to print and then there’s some more gears and motor housings left. Ball-parking it, I’d say it takes 24 hours to print all the parts.”
As for the parts needed that were not 3D printed, here is the list:
- (1) Arduino Leonardo
- (1) BlueSMiRF bluetooth module
- (1) Motor Driver
- (2) DC motors + encoders
- (2) LiPo batteries (3.7V 2000mAh each)
The robot is easily controlled using a smartphone or tablet via Bluetooth, and Spitz has created two different sets of legs for Billy; the spiral ones as shown in the video and images, as well as a set that are straight. Spitz will next turn his attention to printing out a baby brother for Billy, one which is about 20% the size of Billy, which already measures just 4″ tall and 6″in length. As for his ultimate goal, it is to build a robot based on the current model and extend the model to further resemble human form. In his drive to first make a smaller hexapod, he will certainly have his work cut out for him.
“The problem with 3D printing a miniature walking robot is that our printer’s resolution is barely high enough to print the tiny gears that Billy uses,” Spitz explained to us. “Because all the gears printed were slightly different from each other, one of the challenges with Billy was finding the sweet-spot between dealing with too much friction between gears and a loose gear mesh. Heck, if it wasn’t challenging we wouldn’t be doing it!”
It will certainly be interesting to watch as this project develops, and see if a smaller 3D printed hexapod can be created. In the meantime, check out the video of Billy below, and let us know what you think in the 3D printed hexapod robot forum thread on 3DPB.com. Billy now has a Facebook page located here.

Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
Divergent Declares that German 3D Printers are Superior, And Plans Massive LPBF Expansion
Divergent has announced a new version of its Laser Powder Bed Fusion (LPBF) printer and a new site. The company aims to do nothing short of “further accelerating its mission...
Incodema3D Buys 14 Metal EOS Systems, Now One of the World’s Largest Metal 3D Printer Operators
Recently, a majority stake of 3D printing service bureau Incodema3D was purchased by AFM Capital. Under new ownership, the Freeville, New York company is now using its cash-rich parent for...
CEO Yoav Zeif on Why Stratasys’ Markforged Acquisition Is Really a Bet on Industrialization
When Stratasys announced plans to acquire Markforged, the immediate focus was on the deal. Markforged is one of the most recognizable names in additive manufacturing (AM), known for its continuous...
3D Printing & the Autonomous Era: Defense Tech’s Latest Mutation
When we last checked in on the broad defense tech landscape and the role of the additive manufacturing (AM) industry in that environment, it became clear that the connecting thread...
































