3D Printed CubeSat Robot is Controlled with a Headband And Could Tackle Natural Disaster Relief

 Are you interested in a project where human tele-operational control of a robot rover is possible with a hands-free wearable headband that tracks the human’s head movements, thus moving the robot? I thought so. No this isn’t the plot line for the next Science Fiction blockbuster, it’s the technological vision of the Rapid Deployment Automation System (RDAS) which is a 2015 Hackaday prize submission by ‘Erin RobotGrrl’.
Are you interested in a project where human tele-operational control of a robot rover is possible with a hands-free wearable headband that tracks the human’s head movements, thus moving the robot? I thought so. No this isn’t the plot line for the next Science Fiction blockbuster, it’s the technological vision of the Rapid Deployment Automation System (RDAS) which is a 2015 Hackaday prize submission by ‘Erin RobotGrrl’.
To begin: the robotic aspect of this project is the CubeSat, which is 3D printed with hinges that allow folding, using rigid and flexible materials. It basically folds up into a cube when you are not using it, and when you are using it, the idea is that it serves as a preliminary robot for a platform focused on “reconfigurable task based systems.” These kinds of tasks include natural disasters, exploration, and remote actuated monitoring.
“An example mission of this would be for use in natural disaster settings during a humanitarian effort,” Erin writes. “The robot modules would be unpacked from a backpack, then configured and linked together to perform a task. Tasks can vary depending on the scenario, such as sorting supplies to go to a specific area, or even digging out areas to let standing water flow away from shelter locations. By having the robots help with tasks the effort is in parallel with the human, freeing up time for the human to do complex decision making jobs.”
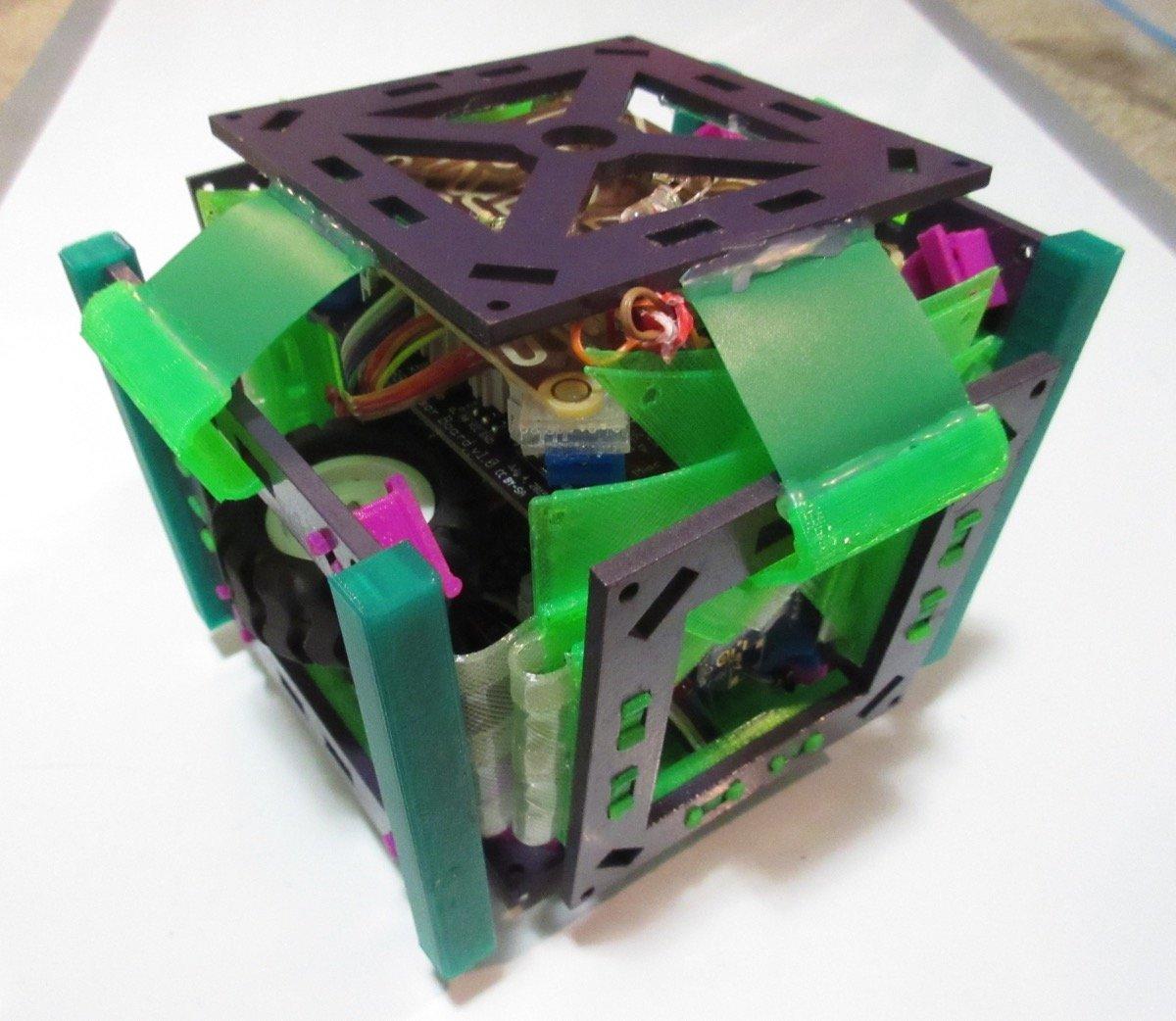
Got it? The RDAS’ designer, Erin RobotGrrl, has her sights set on Mars as well. After the robot is 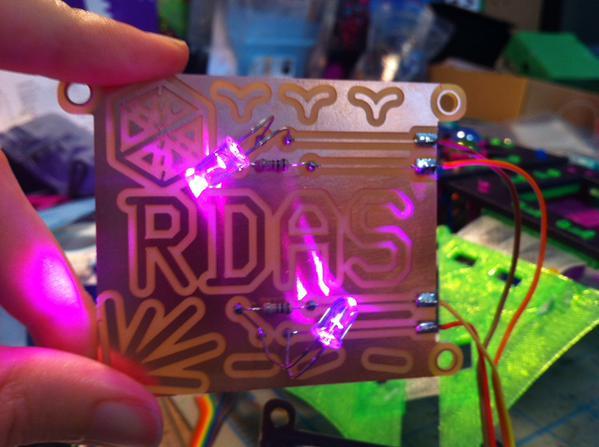 unfolded from its cube, it uses wheels to move and a distance sensor in the front to detect and move obstacles. (In this version, she has to push down on the side of the robot so the wheels can move.) The green panels on the robot will eventually harvest solar energy. RDAS use both motor and sensor boards and the current design(v0.2) uses Hobby DC geared motors.
unfolded from its cube, it uses wheels to move and a distance sensor in the front to detect and move obstacles. (In this version, she has to push down on the side of the robot so the wheels can move.) The green panels on the robot will eventually harvest solar energy. RDAS use both motor and sensor boards and the current design(v0.2) uses Hobby DC geared motors.
Perhaps the most compelling aspect of the project is the 3D printed headset that can be used to operate the robot with the goal of achieving a level of robotic parallelization to human movement that does not have to be controlled constantly. Of course, the idea is that RDAS would be deployed on a mission where they could get some sense of the work that needs to be done. This is a long way off, but a RobotGrrl can dream, right?
 All of the flexible 3D printed parts of the RDAS were only 1mm in width to ensure there would be no in-fill pattern because in-fill could change the way the piece flexes. The design’s flexible features have holes to make it more sparse for more flexibility. Erin RobotGrrl states on her website that “this would only be possible with additive manufacturing, since a multi-axis cnc mill would be too large to fit between the features to drill the holes.”
All of the flexible 3D printed parts of the RDAS were only 1mm in width to ensure there would be no in-fill pattern because in-fill could change the way the piece flexes. The design’s flexible features have holes to make it more sparse for more flexibility. Erin RobotGrrl states on her website that “this would only be possible with additive manufacturing, since a multi-axis cnc mill would be too large to fit between the features to drill the holes.”
The RDAS is an excellent example of the not so distant future when robots and their controllers have more flexibility and autonomy. This robot’s flexible 3D printed parts make it more adaptable in the field, and the ability to control it through a headset is an additional accomplishment that is forward thinking and inspiring. Best of luck to Erin RobotGrrl and her fascinating RDAS project.
Podcast: Play in new window | Download
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.










You May Also Like
Heating Up: 3D Systems’ Scott Green Discusses 3D Printing’s Potential in the Data Center Industry
The relentless rise of NVIDIA, the steadily increasing pledges of major private and public investments in national infrastructure projects around the world, and the general cultural obsession with AI have...
Formlabs Teams Up with DMG MORI in Japan
In late June, Nick Graham, Chief Revenue Officer at Formlabs, announced on LinkedIn that the company had partnered with DMG MORI, one of the world’s leading machine tool companies, to...
EOS in India: AM’s Rising Star
EOS is doubling down on India. With a growing base of aerospace startups, new government policies, and a massive engineering workforce, India is quickly becoming one of the most important...
3D Printing News Briefs, June 25, 2025: R&D Materials, 3D Printed Veneers, & More
In today’s 3D Printing News Briefs, 3DXTECH has launched a program that gives customers early access to experimental materials, and the first Lithoz CeraFab Multi 2M30 in the Czech Republic...