

Improving the Strength & Accuracy of 3D Printed Gears


In the recently published ‘Strength and geometry parameters accuracy improvement of 3D printed polymer gears,’ the authors focus on refining strength and precision in FDM 3D printing. Here, rotary motion is explored, as the Russian research team takes the opportunity to examine the improvement of polymer gears.
In line with the International Standard, according to 12 gears accuracy, ratings include kinematic accuracy, contact, and gear backlash fluency. The polymers featured exhibited the following:
- Low elastic modulus
- Significant linear expansion coefficient
- Shrinkage at the stiffening
- Parts dimensional instability
The researchers state that all these items show that polymer gears can meet the challenge of an 8…12 accuracy rating.

Workpiece drawing of a straight-toothed gear
Previous approaches have aimed at reducing material and overhangs in more complex geometries. Here the goal was to outline the gears coordinate system, define the shortest functional dimensional communications with basic elements, and ‘actualize’ FDM techniques, along with slicing software.
A gear works from the basic design datum and a sectional involute element. The basic element consists of the A4 base, the B1 base, and the C1 base.
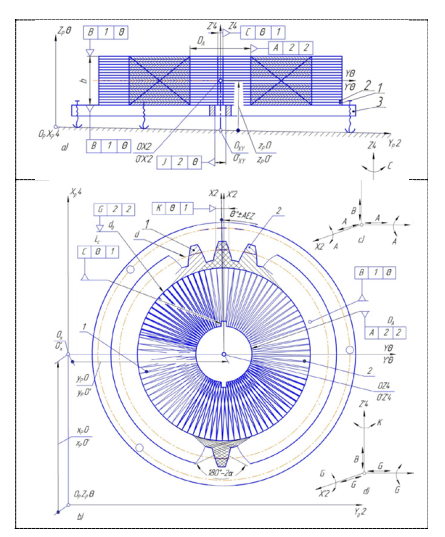
Functional model for gears additive production; a) frontal projection; b) horizontal projection; c) main base set indicator; d) additional base set indicator; 1- uneven-numbered layer; 2- even-numbered layer; 3- building table; OрXр4Yр2Zрθ – 3D – printers coordinate system
While the basic three design datum set limits six degrees of freedom, the researchers state that at the same time neither of the six is doubled. Ultimately, six coordinates are enough in the case of the sectional involute element; however, the researchers state that it is unreasonable to set any coordinate relating Yθ coordinate axis having zero informativity, as it would lead to ‘both redundant over-positioning and location uncertainty.’
The researchers saw that additive techniques can be advantageous over conventional ones because of the datum sets, however, in considering the OX2YθZ4 basic coordinate system of the basic gear design datum, geometrical accuracy will increase with numerical coordinates values and ‘reduction of printing parts model points.
One of the disadvantages, however, is the contravention of the base and the inversion unanimity principle.
“To avoid over-positioning, it is recommended to equip the printer with the building as the functional locating tool, which is regulated by the two-angle. The work locating plane is positioned normal to the Zрθ printer axis, which is parallel to the nozzle movement. The table central hole axis can be used as the J2 auxiliary base whereby the XpO, YрO, ZрO zero-point coordinates of the OX2YθZ4 gear coordinate system are set at the 3D operation procedure,” concluded the researchers.
“Moreover, following the inversion principle the gear needs to move the same way as the one turning the А4 basic hole axis. It is impossible for 3D printers based on the conventional Cartesian coordinates system. The facts listed agree with conclusions presented regarding reasonability of 3D printer construction based on cylindrical coordinate systems.”
3D printing is attractive to engineers around the world, meaning that gears are often part of the equation for moving parts, from those made for toy race cars to spur gears, and even research studies centered around the strength of gears.
What do you think of this news? Let us know your thoughts; join the discussion of this and other 3D printing topics at 3DPrintBoard.com.
[Source / Images: ‘Strength and geometry parameters accuracy improvement of 3D printed polymer gears’]Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
Limitless Labs Raises $20 Million in Series A Funding for Agentic CAD
Limitless Labs has raised an additional $20 million for its agentic CAD/CAM platform, bringing its total funding to date to $27.3 million. Investors in the Series A round include Dell...
The Seminal Moment: Creality’s IPO Analysis & Possible Effects
Something super important happened just a few days ago, and too few people paid attention. Creality, a pioneer in low-cost desktop material extrusion printers, went public. Creality is now listed...
As Longevity Gains Momentum, Rem3dy Health Raises £14 Million for 3D Printed Nutrition
Longevity hack or healthcare trend? The answer may depend on who you ask, but investor interest in personalized nutrition is growing as consumers search for the next longevity hack. Now,...
Flashforge Unleashes Wax 3D Printer
Flashforge has released a wax 3D printer. Wax printing was pioneered by Solidscape, a company acquired by Stratasys and later sold to Prodways before being shuttered in 2024. That firm’s wax jetting...
































