Researchers Integrate 3D Printing & Wearable Sensors to Make Accessible Prosthetic Hand


A trio of researchers from UC Berkeley and the Hong Kong University of Science and Technology recently published a paper, titled “Mechatronics Enabling Kit for 3D Printed Hand Prosthesis,” about how they worked to integrate wearable sensors and affordable robotics with 3D printing in order to “enable accessibility” in the power prosthesis sector. Tat Hang Wong, Davide Asnaghi, and Suk Wai Winnie Leung used their mechatronic product platform, Sparthan, for their research.
The abstract reads, “Sparthan leverages 3rd party EMG sensors, Myo armband, to process muscles sensor data and translate user intention into hand movements. Key innovation includes the modularity, scalability and high degree of customization the solution affords to the target users. User-centered design approaches and mechatronic system design are detailed to demonstrate the versatility of integrative systems and design. What started off as an engineering research endeavor is also positioned to be deployed to deliver real-world impact, especially for prosthesis users in developing countries.”
Due to multiple advance in computational and neuroscience approaches, the landscape for smart devices designed to serve disabilities related to mobility has changed significantly. While the project originally stemmed from a student innovation initiative, the team thinks their solution will be beneficial for adult, children, and the elderly in need of hand prostheses in developing countries.
Market Gap filled by Sparthan
Most powered prostheses that enable basic motions are not cheap, which is tough when children grow out of them so quickly. The researchers detailed a few other organizations working to develop better prosthetic solutions, such as e-NABLE, UC Berkeley’s Million Hands project, and Open Bionics.
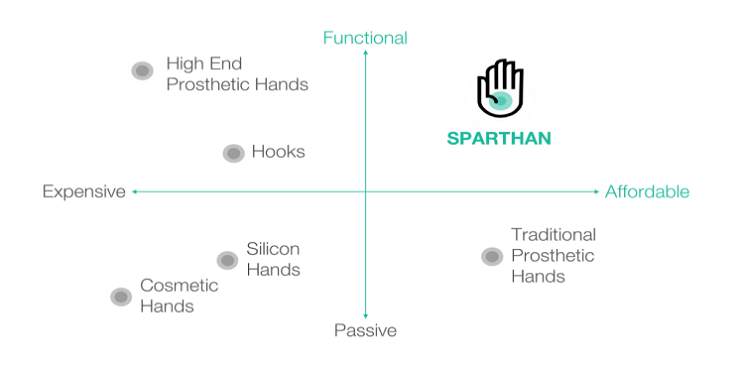
“Market research shows a gap in the market for a solution that provides affordable and accessible prosthesis,” the researchers wrote.
“Low cost and accessibility, however, are not sufficient to create meaningful impact in a scalable and adaptable fashion. Within this project, we employ lean product development cycle, machine learning for gesture recognition, and adaptive model-based control to deploy the first version of Sparthan.”

Simplified QFD prioritization of Sparthan’s Product Features
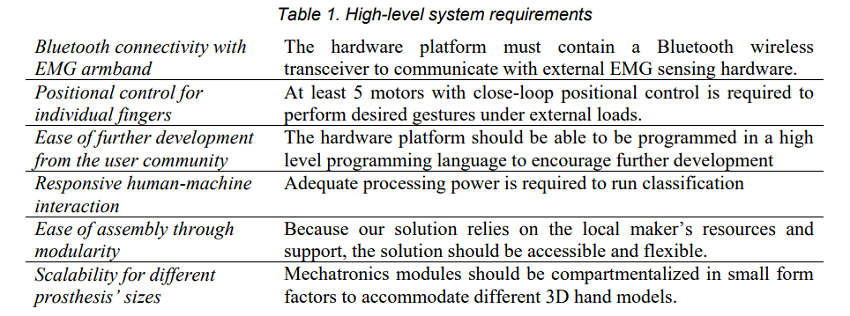
They performed market research in Beijing, Hong Kong, San Francisco, and Seoul, and determined the most important user needs for a prosthetic hand are its appearance, durability, functionality, and weight. Then, the researchers used a Kano model and simplified QFD to expand upon some important requirements, which are detailed in the table below.
The people surveyed kept mentioning the same pain point – that their prostheses were uncomfortable and difficult to fit. So the Sparthan researchers worked hard to make sure that their product was more accessible to end users, with easier design requirements such as:
- compatibility with existing 3D hand models through multiple versions
- easy installation procedures, including video tutorials and snap-on mechanism
- intuitive UI interface for app-based DIY processes, like gesture mapping and 3D scanning
The Sparthan is compatible with all existing 3D models that are based on flexible joints printing, and EMG signals from the patient’s forearm are utilized for the UI.
“Muscles and tendons are still present in the forearm either in the event of an amputation or in the case of a congenital malformation,” the researchers explained. “These leftover muscles can be contracted and controlled directly by the patient, providing an intuitive and fast way to interact with the prosthetic hand.”
The palm contains a micro controller unit, which processes the signals and determines when a certain gesture is performed; embedded micro electric motors are used to actuate the corresponding fingers.
The mechanical system of a Sparthan-equipped prosthetic hand has two main sections – the polycarbonate module, which allows for myoelectric control of the 3D printed prosthetic hands, and the hand itself. The piece of string in the prosthetic is guided by hollow paths routed through the module housing. The module can be made via 3D printing, or by stacking laser cut plastic sheets.
Flexy Hand 2
“The Sparthan module is designed in a way such that it can be easily fitted into 3D printable prosthetic hand models with simple modifications,” the researchers wrote. “Using an additive manufacturing method such as 3D printing presents multiple advantages for designing prosthetic devices, especially with regards to customization. Comfort and fit are key factors for any prosthesis, and due to the high degree of customization required it is inherently hard to mass manufacture these devices with traditional methods.”
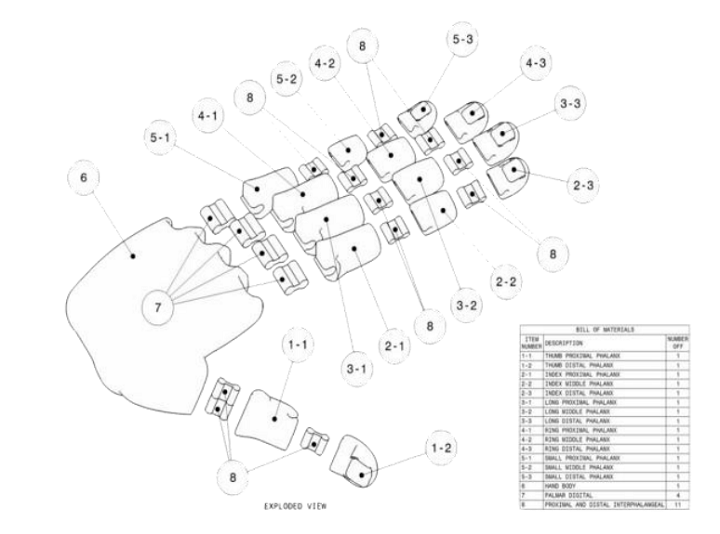
The team modeled its first Sparthan-ready prosthetic hand after the Flexy Hand 2 model. The finger joints were 3D printed with a flexible filament, so that they can move easily back into place after the motors flex them out.
What sets the Sparthan apart from other 3D printed prosthetic hands is its ability to use motors to control finger movement. The device uses a commercially available Myo armband by Thalmic Labs to record and transmit eight different EMG signals along the forearm, and the team designed a custom PCB to receive and process the data through a Bluetooth module.

Myo armband
A smartphone app with a camera is used to create an accurate 3D model of the user’s hand and arm, and is later sent to be 3D printed at a location close to the actual user.
“Partnering with makerspaces and schools enables Sparthan to take full advantage of the already existing network of 3D printers,” the researchers explained. “The electronics are designed to be plug-and-play, meaning that once the hand is printed it’s just a matter of snapping the module we will ship in place. The goal is to maximize opportunities for end users to be involved in the fitting process via online tools.”

Sparthan App for scanning hand for rehabilitative application
This year, the team plans to introduce its Sparthan kit to stakeholders (prosthetic users, medical rehabilitation units, etc.) for beta testing. Additionally, the researchers have formed partnerships with the Million Hands project and “local NGOs grant-based social impact deployment” in order to open up more project opportunities.
“The fine tuning of system modelling and adaptive control will be done in tandem to better the overall user on boarding experience,” the researchers concluded. “Finally, we also look to employing the mechatronic enabling kit concept to other applications beyond 3D printed hand prosthesis; e.g. motorization of lightweight exoskeleton.”
Discuss this and other 3D printing topics at 3DPrintBoard.com or share your thoughts below.
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
Goal! 3D Printing for the 2026 FIFA World Cup
The 2026 FIFA World Cup officially kicked off in Mexico City on June 11th. It’s the largest FIFA tournament in history, with 48 teams competing over 104 matches. Instead of...
Bambu Lab Wants Home 3D Printing to Feel Less Like a Workshop with PLA Pure
As desktop 3D printers become increasingly common in homes, Bambu Lab is focusing attention on something beyond print speed and hardware features. This week, the company launched a new filament,...
The Rise of IP: The First Emoji 3D Printer Is Here. Don’t Rule Out Star Wars Next.
For years, most desktop 3D printers have looked more or less the same. Some are black. Some are gray. A few are bright orange. They look like boxes. Some are...
AM Asia Watch: China Exported 2.46 Million 3D Printers in Four Months
China’s consumer 3D printer industry seems to be reaching a new level of global dominance. According to Chinese state media outlet China Global Television Network (CGTN), China exported 2.46 million...