
Researchers Create Dynamic Self-Assembly Process for Building Mobile Micromachines


Shape-encoded assembly of magnetic microactuators in the form of a microvehicle.
A micromachine has the potential to maniupulate and probe the microscopic world, and can be made up of multiple chemistries, materials, or parts in order to address different functions, such as actuation, delivery, sensing, and transport. Its performance and functional modes can be commanded by the interaction and organization of its variable constituents, and it can be 3D printed, but it’s difficult to build programmable structural assemblies into mobile micromachines.
A group of researchers from the Max Planck Institute for Intelligent Systems and ETZ Zurich published a study in Nature Materials, titled “Shape-encoded dynamic assembly of mobile micromachines,” in which they introduced a new directed, dynamic self-assembly process of building mobile compound micromachines, with specific configurations.
The process use pre-programmed physical interactions between structural and motor units, and is driven by dielectrophoretic interactions (DEP) that are encoded in the 3D shape of individual parts. These DEP forces modulate the part’s 3D geometry in order to “encode precisely controlled distribution of electric field gradients around a body.”
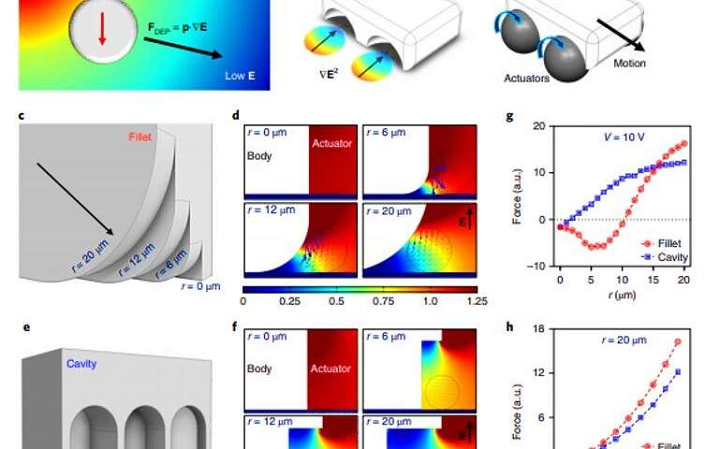
Spatial encoding of DEP attraction sites by modulating the 3D geometry.
First, the researchers – Yunus Alapan, Berk Yigit, Onur Beker, Ahmet F. Demirörs, and Metin Sitti – programmed field gradients around a construct, so they could use DEP interactions to “drive the assembly of micromachine parts” at specific locations.
“The working principle of the device under electric fields relied on the shape-dependent regulation of electric fields around polarizable bodies of the assembled micromachine,” a Phys.org piece states.
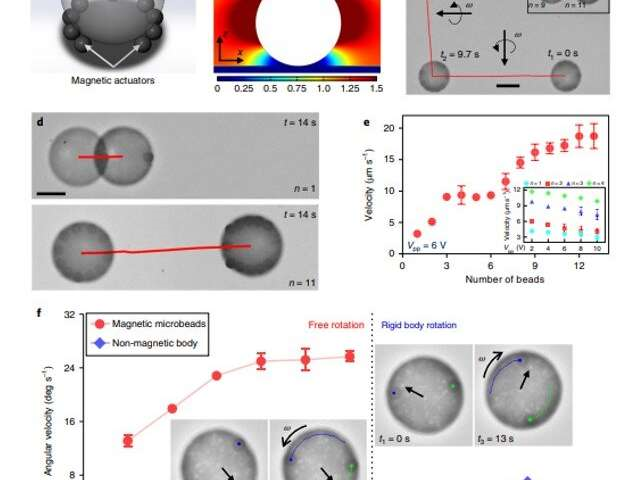
The team needed a way to program local gradients, and looked into how they could modulate non-electric fields around different geometries. Then, they were able to control the mobile micromachine’s self-assembly, which was influenced by electric fields, using a microvehicle as an example. It had a large, spherical, non-magnetic, dielectric body, with several smaller magnetic actuators surrounding it. When an electric field was applied in the Z axis, the large body was able to generate enough local electric field gradients so as to attract smaller microactuators; these acted as wheels, and the researchers could steer the microvehicle by simply changing the direction of the magnetic field.

Assembly and translation of a compound microvehicle with magnetic actuators.
When they increased the number of microactuators, the microvehicle’s velocity also grew, but when the voltage was increased, the velocity went down. The researchers think this is due to increased mechanical coupling, during DEP interactions, between the microparticles and the substrate.
At lower voltages, small DEP forces “led to a loose lubrication-based coupling phenomenon” that made it possible for microactuators to move freely around the pole. This means it’s possible to regulate the strength of the DEP forces between the microactuators and passive body to adjust their mechanical coupling, in order to control the microvehicle’s rotational degrees of freedom.
Reversible assembly of magnetic microactuators with a non-magnetic body using DEP forces.
The researchers used shape-encoded physical interactions to make programmable self-assembling mobile micromachines by developing frames that had specific 3D geometries to help generate electric field gradients. The framework, made with two-photon lithography, attracts microactuators to specific locations on the frame. In one example, they made a microcar with four-wheel pockets that generated DEP forces and helped guide the magnetic microactuators into said pockets. Within just second of applying an electric field, the microcar completed an on-demand self-assembly: the magnetic wheels inside the pockets went into a free rotation due to the vertically rotating magnetic field.
The prototype was expanded in order to build reconfigurable micromachines, which are run by self-propelled micromotors. Self-propelled Janus silica (SiO2) microparticles with a gold cap were used to assemble these micromachines, and their DEP response and frequency-dependent self-propulsion made it possible to create mobile micromachines that featured self-repair and reconfigurable spatial organization. Then, the researchers defined the physical interactions between these mobile micromachines by expanding the shape-encoded DEP interactions in a two-level hierarchical assembly:
- Level 1: self-propelled actuators assembled with two microstructure units form mobile micromachines with linear translation
- Level 2: generation of low electric fields cause second and first units to assemble together laterally

R-L: Shape-encoded reconfigurable assembly of micromachines with self-propelled microactuators for frequency-tunable locomotion; Hierarchical assembly of multiple micromachines via shape-encoded DEP interactions.
The research team was able to extend their current design into the manipulation of 3D microactuators, and micromachine assembly, and say that it even has the potential to be used with lab-on-a-chip devices for digital manipulation, sorting, continuous transport, and microfluidic flow generation.
“The site-selective assembly strategy was versatile and could be demonstrated on different, reconfigurable, hierarchical and 3D mobile micromachines. The scientists anticipate the design principles presented in the work to advance and inspire the development of more sophisticated micromachines integrated in multiscale hierarchical systems.”
This design strategy makes it possible to achieve programmable self-assembly through the use of micromachines’ shape-directed dynamic assembly, which will give scientists more control over functions and dynamics. Because the team was able to incorporate heterogenous components for actuation, cargo loading, and sensing in a single step, their work may make it possible for others to engineer multifunctional, multimaterial microrobots.
The researchers will now focus on optimizing and expanding on “the irreversible assembly of micro-components” for better performance in applications that don’t use electric fields, such as in vivo biomedical applications.
Discuss this research and other 3D printing topics at 3DPrintBoard.com or share your thoughts below.
[Source/Images: Phys.org]Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
How the World’s Most Advanced Tech Companies Are Using 3D Printing
3D printing has been around for decades. For most of that time, it was a prototyping tool. Engineers used it to check if a design looked right before spending money...
The New Dental Lab: “Three Technicians Can Handle a Hundred Arches,” Says Digital Dentistry Expert Josh Jakson
Josh Jakson’s path into digital dentistry started long before he had a job title. He grew up around it. His father, a Polish immigrant, started the family’s dental laboratory in...
Why Beam Control Could Redefine the Future of EB-PBF
In Part 1, Ulf Lindhe examined how advances in beam control, point melting strategies, and process monitoring are changing the way engineers think about electron beam powder bed fusion (EB-PBF)....
Additive Manufacturing at a Crossroads
Additive manufacturing is at a crossroads. Simultaneously, we find ourselves between certain very different modalities, applications, and industries. Rather than being able to explore them all, companies will now have...

































