

University of Illinois at Urbana-Champaign: Researchers Reveal Their Recipe for 3D Printed Bio-Bots


 The worlds of 3D printing and robotics often collide, as we’ve seen continually—and most recently—with everything from nearly invisible hydrogel robots to those capable of doing pushups and sweating. And while scientists predict that one day you may see robots walking right out of your 3D printer, today we are taking a look at bio-bots that seem like they may have walked right out of a sci-fi movie.
The worlds of 3D printing and robotics often collide, as we’ve seen continually—and most recently—with everything from nearly invisible hydrogel robots to those capable of doing pushups and sweating. And while scientists predict that one day you may see robots walking right out of your 3D printer, today we are taking a look at bio-bots that seem like they may have walked right out of a sci-fi movie.
Created by researchers at the University of Illinois at Urbana-Champaign, these bio-bots locomote via a true system of muscle cells, powered by electronics. The team, headed by Rashid Bashir, has shared their recipe for building these futuristic machines in a recent Nature Protocols article. In ‘A modular approach to the design, fabrication, and characterization of muscle-powered biological machines,’ by Ritu Raman, Caroline Cvetkovic, and Rashid Bashir, you can take an entirely new DIY approach to the world of bots.
Ritu Raman
“The protocol teaches every step of building a bio-bot, from 3D printing the skeleton to tissue engineering the skeletal muscle actuator, including manufacturers and part numbers for every single thing we use in the lab,” explained Ritu Raman, a postdoctoral fellow in the Department of Bioengineering and the study’s first author.
“This protocol is essentially intended to be a one-stop reference for any scientist around the world who wants to replicate the results we showed in our PNAS 2016 and PNAS 2014 papers, and give them a framework for building their own bio-bots for a variety of applications.”

As the authors discuss in their paper, these biological machines can adapt to their environment. They also point out that 3D printing has been a major impetus for the progress seen here in robotics, through allowing such advances in tissue engineering and regenerative medicine. The biomaterials of today now allow for the creation of what the researchers call “smart responsive machines,” able to work in a range of different applications.
“The 3D printing revolution has given us the tools required to ‘build with biology’ in this way. We re-designed the 3D-printed injection mold to produce skeletal muscle ‘rings’ that could be manually transferred to any of a wide variety of bio-bot skeletons. These rings were shown to produce passive and active tension forces similar to those generated by muscle strips,” Raman said.
“Using optogenetics techniques, we worked with collaborators at MIT to genetically engineer a light-responsive skeletal muscle cell line that could be stimulated to contract by pulses of 470-nm blue light. The resultant optogenetic muscle rings were coupled to multi-legged bio-bot skeletons with symmetric geometric designs. Localized stimulation of contraction, rendered possible by the greater spatiotemporal control of light stimuli over electrical stimuli, was used to drive directional locomotion and 2D rotational steering.”
The bio-bot schematic [Photo: Janet Sinn-Hanlon, University of Illinois]
In writing the paper and releasing their bio-bot ‘recipe,’ the researchers are hoping to see others not only appreciate and re-create their work—but to improve on it as well. The team hopes this is just the beginning as scientists everywhere are able to begin meeting current challenges in medicine and science. Discuss in the 3D Printed Bio-Bots forum at 3DPB.com.
[Source: Phys.org]
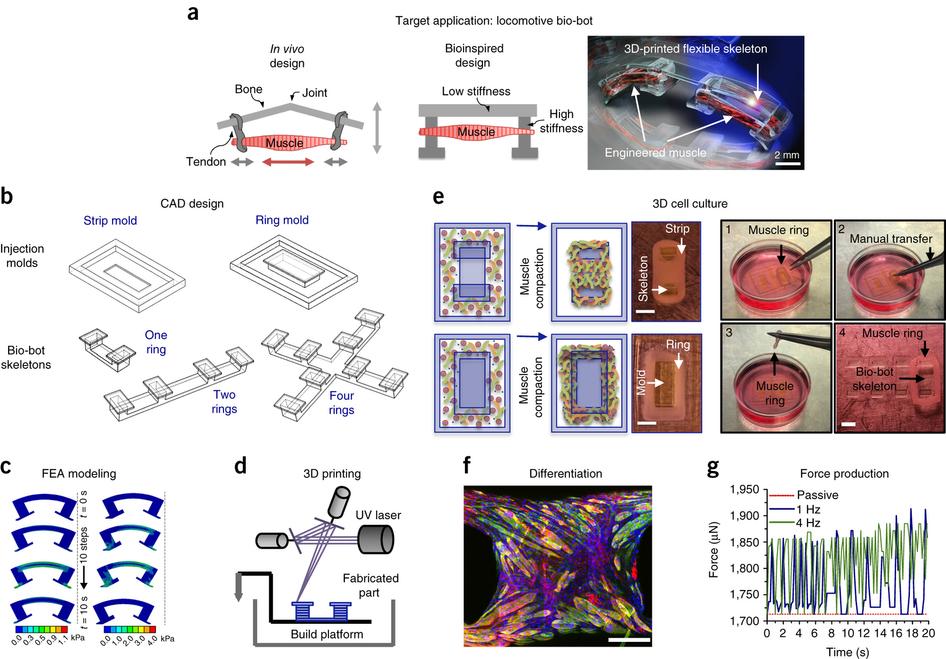
Bio-bot process overview, from ‘A modular approach to the design, fabrication, and characterization of muscle-powered biological machines.’ (a) Bio-bot design is inspired by biological design in the body. (b) Bio-bot skeletons and muscle bioactuator injection molds are designed using computer-aided design (CAD) software (Steps 1 and 2), (c) tested using finite element analysis (FEA) software (Steps 20–25), and (d) manufactured via stereolithographic 3D printing (Steps 3–10). (e) Muscle rings are tissue-engineered and coupled to bio-bot skeletons (Steps 11–16), and assessed via (f) immunohistochemical staining (Step 26) and (g) externally stimulated force production (Step 19). Each step of the design process (a–g) is iterative, and feedback from each step is used to improve the functionality of the bio-bot with each iteration. Scale bars, 2 mm (e); 500 μm (f). a,c,f adapted with permission from ref. 13, National Academy of Sciences; b,d,e adapted with permission from ref. 14, National Academy of Sciences.
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
The Seminal Moment: Creality’s IPO Analysis & Possible Effects
Something super important happened just a few days ago, and too few people paid attention. Creality, a pioneer in low-cost desktop material extrusion printers, went public. Creality is now listed...
As Longevity Gains Momentum, Rem3dy Health Raises £14 Million for 3D Printed Nutrition
Longevity hack or healthcare trend? The answer may depend on who you ask, but investor interest in personalized nutrition is growing as consumers search for the next longevity hack. Now,...
3Dnatives to Present ADDITIV Metals 2026: Resolving Key Barriers to Scaling Metal Additive Manufacturing
As the metal additive manufacturing sector prepares for a massive leap—with market valuations expected to climb from $6.02 billion to $7.02 billion this year—the industry is shifting its focus from...
Stratasys Dental’s Negar Movahed Says They’re “Open for Partnerships”
According to “3D Printing for Dentistry 2025: Market Study and Forecast” by AM Research, the dental 3D printing market generated $5.2 billion in revenue in 2024—that’s nearly one third of...
































