
Italy’s WitLab Creates 3D Printed ArcheoRov, Ready for Underwater Archaeological Expeditions


![]() I really enjoy learning, and writing, about drones. There are a lot of applications for drone technology, ranging from the more mundane (but fun!) pizza delivery to cutting-edge drones being used as first responders in search and rescue operations. So, what’s even cooler than a drone flying through the air? Drones swimming through the water, of course!
I really enjoy learning, and writing, about drones. There are a lot of applications for drone technology, ranging from the more mundane (but fun!) pizza delivery to cutting-edge drones being used as first responders in search and rescue operations. So, what’s even cooler than a drone flying through the air? Drones swimming through the water, of course!
We’ve seen drone technology and additive manufacturing used to help make the NEMO (Nautical Exploratory Modular Observer) and the Blue Robotics submarine drone with 3D printed thruster, and who could forget the CRACUNS submersible drone that can go straight from underwater to high in the air? Now, Italy-based WitLab has taken to the water as well – meet the 3D printed ArcheoRov.

ArcheoRov [Image: Maritime Journal]
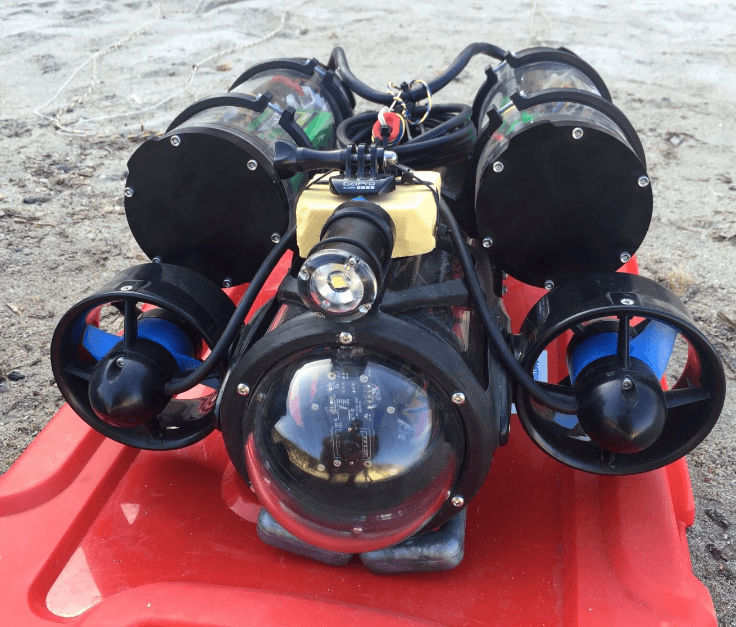 ArcheoRov was built in the Roverto WitLab, which is in the green Manufacturing Project incubator of Trentino Development. It was designed and built for Arc-Team, a company that provides multiple services in the cultural heritage field, including underwater archaeology, aerial shots by flying drones, archival research and historical studies, and archaeological excavations.
ArcheoRov was built in the Roverto WitLab, which is in the green Manufacturing Project incubator of Trentino Development. It was designed and built for Arc-Team, a company that provides multiple services in the cultural heritage field, including underwater archaeology, aerial shots by flying drones, archival research and historical studies, and archaeological excavations.
“The project was created to archaeological requirements. Six months ago l’Arc-Team Cles asked us a small submarine drone to explore the depths of the alpine lakes,” Andrea Saiani, the other ArcheoRov creator, explained to Wired Italy (translated). “It weighs 6 pounds, compared with 70-80 pounds of products already on the market, therefore, an archaeologist you can carry in a backpack. It costs about 2,500 Euros, against an average of 25 thousand.”
Dr. Rocco explained that ArcheoRov is able to orient its body upwards or downwards, in order to get the best view possible from one of its two cameras, as it is able to “tip itself on end and sink or rise in seconds.” This characteristic makes the little underwater ROV perfect for sweeping visual surveys, necessary for archaeological expeditions. Its small size makes it suitable for the job Arc-Team needs it for: hard-to-reach stone age relics that are preserved deep in mountain lakes.
![Initial calibration tests of ArcheoRov's underwater camera [Image: WitLab]](https://3dprint.com/wp-content/uploads/2017/01/Initial-calibration-tests-of-ArcheoRov-underwater-camera.png)
Initial calibration tests of ArcheoRov’s underwater camera [Image: WitLab]
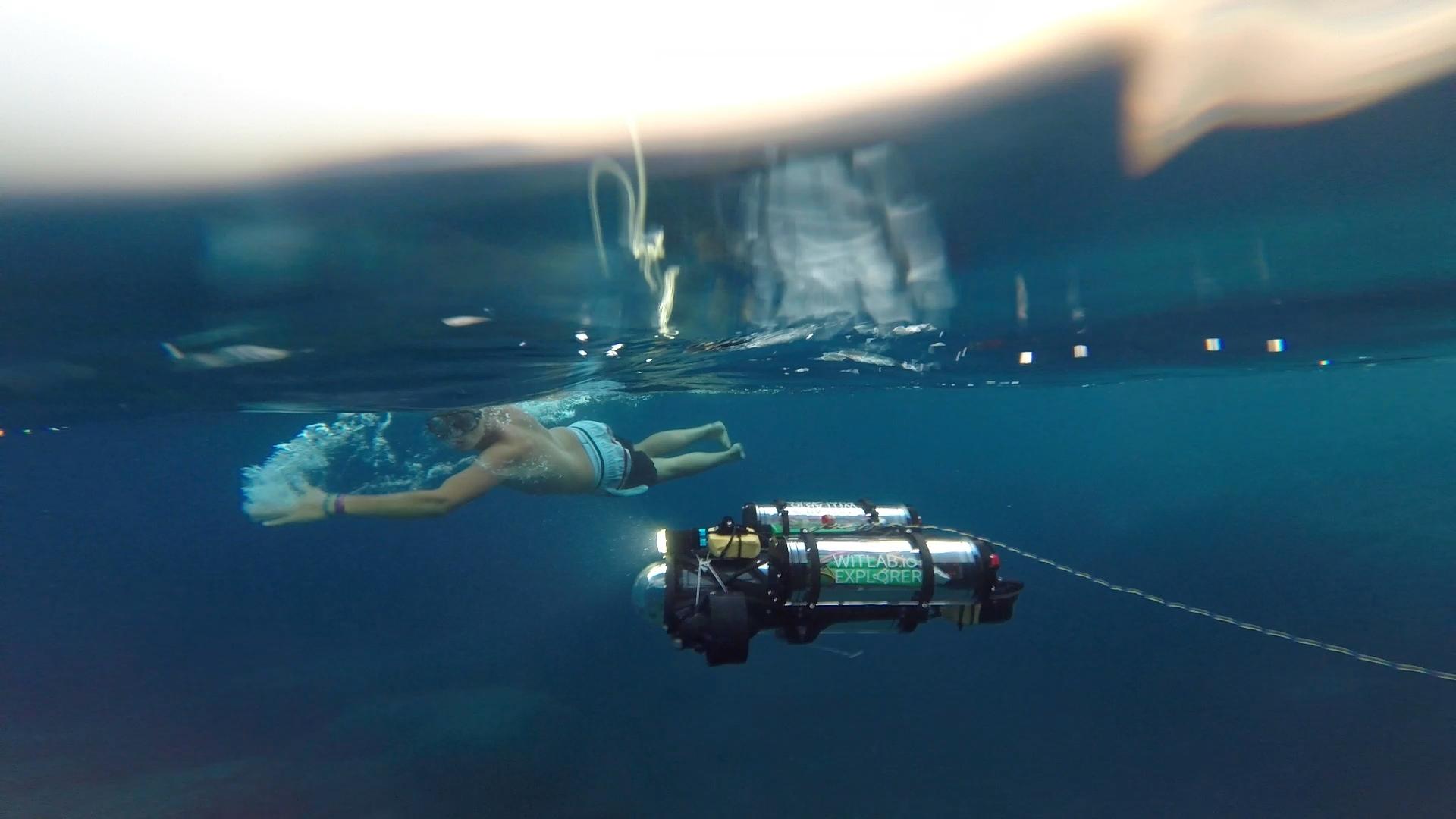 The research team had a lot of ideas at the beginning, and used one of WitLab’s rapid prototyping machines to print up three possible candidates. Once they constructed the plastic outline for what would become the ArcheoRov, they just needed to attach the motors, which were powered from a source outside the tank, and see what type of configuration gave them the response they were looking for. Finally, ArcheoRov had its first successful underwater outing in Madrone Alpine Lake, in Trentino, Italy, at 2,400m altitude.
The research team had a lot of ideas at the beginning, and used one of WitLab’s rapid prototyping machines to print up three possible candidates. Once they constructed the plastic outline for what would become the ArcheoRov, they just needed to attach the motors, which were powered from a source outside the tank, and see what type of configuration gave them the response they were looking for. Finally, ArcheoRov had its first successful underwater outing in Madrone Alpine Lake, in Trentino, Italy, at 2,400m altitude.
 One of the most pertinent features of the ArcheoRov is that the design is open source, so anyone with a 3D printer and a love for things under the sea is able to access it and build their own ArcheoRov. It uses the Robot Operating System (ROS), which is a set of open source software tools and libraries. Dr. Rocco believes that we are entering a new phase of professional experimentation, where researchers can work on assembling their own ROV or drone for the exact purpose they need, whether it’s pollution monitoring, marine biology, exploring reefs and shipwrecks, and archaeologists who research the seabed.
One of the most pertinent features of the ArcheoRov is that the design is open source, so anyone with a 3D printer and a love for things under the sea is able to access it and build their own ArcheoRov. It uses the Robot Operating System (ROS), which is a set of open source software tools and libraries. Dr. Rocco believes that we are entering a new phase of professional experimentation, where researchers can work on assembling their own ROV or drone for the exact purpose they need, whether it’s pollution monitoring, marine biology, exploring reefs and shipwrecks, and archaeologists who research the seabed.
Dr. Rocco said, “This is important because by doing so we are enabling the developer community to easily add their custom software extensions or even make ArcheoROV semiautonomous…Now it’s quick and cheap, people can design their own ROV.”
The ArcheoRov hardware was designed using SOLIDWORKS, and software written using Python. The first model, with a camera for navigation and one for 3D shooting, is already available, but WitLab is already back to the drawing board, developing a sonar-equipped version with a thermometer and a mechanical arm. A Kickstarter campaign is in the works for next year.
Check out this video to see the ArcheoRov swimming in action:
https://youtu.be/Zp8wzjNl3DQ
Discuss in the ArcheoRov forum at 3DPB.com.
[Sources/Images: WitLab / Maritime Journal / Wired]
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
The Drone Economy Needed a Scalable Manufacturing Backbone. ADDMAN Built One
When ADDMAN closed its acquisition of Forecast 3D in January 2026, the headlines focused on fleet size and Southern California footprint. Six months later, those metrics feel almost beside the...
The Drone Industry is Showing Where 3D Printing Delivers Real Value, AM Research Report Finds
The rapid rise of drones is creating one of the biggest opportunities for additive manufacturing (AM). Whether they’re used on battlefields, inspecting bridges or crops, or delivering supplies, drones need...
The Longevity Economy Needs a Factory
Longevity has become one of the biggest stories in healthcare. Every week seems to add a new announcement about an anti-aging therapy, an AI-powered drug discovery platform, or a startup...
The SLS Market: Game of Trucks
This is truly an exciting moment in the SLS market. With HP‘s release of the 1200 and Formlabs‘ release of the X1, we can see the SLS market heating up....































