Lessons Learned: Empire Robotics Explains Failed Attempt to Commercialize Soft Robotics Technology

![]() Near the end of Christopher Nolan’s 2005 film Batman Begins, Bruce Wayne is injured and lamenting his inability to save Gotham City. His butler and confidant, Alfred Pennyworth, channeling the departed Thomas Wayne, says to Bruce, “Why do we fall, sir? So that we can learn to pick ourselves up.” It’s never easy to admit that we’ve failed, especially at something we’ve put a lot of time, effort, and potentially even money into. But if you’re able to learn from your mistakes, you can come back stronger than ever. Empire Robotics, which specializes in flexible robotic end-effectors and soft robotics, was founded in 2012 and spent the last four years developing, and attempting to commercialize, its jamming-based VERSABALL gripper technology. Notice I said “attempting” to commercialize…the team of soft robotics experts, materials scientists, and automation engineers were ultimately not successful, and the company recently closed its doors.
Near the end of Christopher Nolan’s 2005 film Batman Begins, Bruce Wayne is injured and lamenting his inability to save Gotham City. His butler and confidant, Alfred Pennyworth, channeling the departed Thomas Wayne, says to Bruce, “Why do we fall, sir? So that we can learn to pick ourselves up.” It’s never easy to admit that we’ve failed, especially at something we’ve put a lot of time, effort, and potentially even money into. But if you’re able to learn from your mistakes, you can come back stronger than ever. Empire Robotics, which specializes in flexible robotic end-effectors and soft robotics, was founded in 2012 and spent the last four years developing, and attempting to commercialize, its jamming-based VERSABALL gripper technology. Notice I said “attempting” to commercialize…the team of soft robotics experts, materials scientists, and automation engineers were ultimately not successful, and the company recently closed its doors.
 Soft robotics is really interesting – gone are the days when the world thought robots were just rigid, metal machines. This field is in the headlines a lot these days, thanks in large part to 3D printing – the technology develops and uses soft materials in ways that would have been unthinkable in the not-too-distant past. 3D printing helped create the world’s first fully autonomous soft-bodied robot, and a prosthetic hand that looks, and feels, almost like the real thing. So you would think that the VERSABALL, which uses soft robotics to enable “secure grasping and manipulation of widely varying objects,” would have gone off like gangbusters in all sorts of technology fields, from manufacturing automation to collaborative robotics.
Soft robotics is really interesting – gone are the days when the world thought robots were just rigid, metal machines. This field is in the headlines a lot these days, thanks in large part to 3D printing – the technology develops and uses soft materials in ways that would have been unthinkable in the not-too-distant past. 3D printing helped create the world’s first fully autonomous soft-bodied robot, and a prosthetic hand that looks, and feels, almost like the real thing. So you would think that the VERSABALL, which uses soft robotics to enable “secure grasping and manipulation of widely varying objects,” would have gone off like gangbusters in all sorts of technology fields, from manufacturing automation to collaborative robotics.
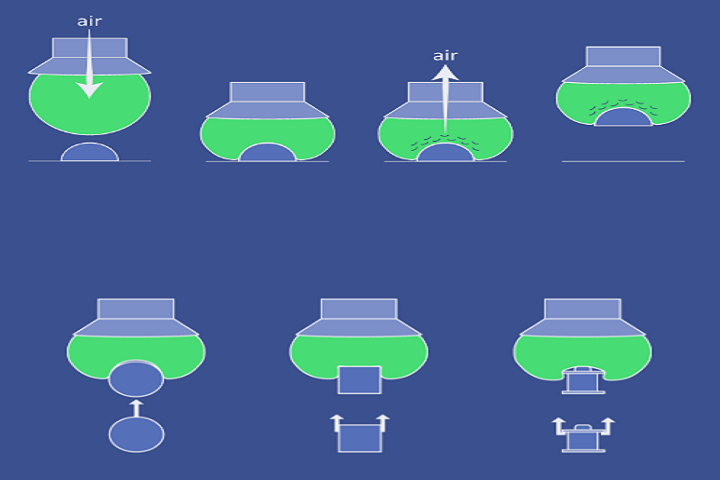 The VERSABALL works through a “jamming phase transition of granular materials.” A sand-like material fills the ball, and when air is pumped into the ball, it softens. Then the ball is literally pushed up against the object it means to pick up, and is hardened when the air is pulled back out of the ball, which jams the sand together. The gripping forces are created from the transition from soft to hard. Unfortunately, in spite of all of its best efforts, the company failed to bring its robotic gripper technology to market, as the arduous process of commercializing a new product can be the biggest challenge for R&D companies. But instead of being defeated, the company’s management team is dusting themselves off and telling their story in peer-reviewed journal Soft Robotics.
The VERSABALL works through a “jamming phase transition of granular materials.” A sand-like material fills the ball, and when air is pumped into the ball, it softens. Then the ball is literally pushed up against the object it means to pick up, and is hardened when the air is pulled back out of the ball, which jams the sand together. The gripping forces are created from the transition from soft to hard. Unfortunately, in spite of all of its best efforts, the company failed to bring its robotic gripper technology to market, as the arduous process of commercializing a new product can be the biggest challenge for R&D companies. But instead of being defeated, the company’s management team is dusting themselves off and telling their story in peer-reviewed journal Soft Robotics.
 In the article “Soft Robotics Commercialization: Jamming Grippers from Research to Product,” Empire Robotics’ President, CTO, Director of R&D, and Principal Research Scientist explain how they attempted to “develop a sustainable business around jamming-based robotic gripper technology.” The four co-authors, John Amend, Nadia Cheng, Sami Fakhouri, and Bill Culley, describe their R&D efforts, including shape, composition, and durability of the VERSABALL membrane, product design, product features like speed and pneumatics, and the characteristics of the VERSABALL they thought would most influence a customer to make the decision to purchase the technology.
In the article “Soft Robotics Commercialization: Jamming Grippers from Research to Product,” Empire Robotics’ President, CTO, Director of R&D, and Principal Research Scientist explain how they attempted to “develop a sustainable business around jamming-based robotic gripper technology.” The four co-authors, John Amend, Nadia Cheng, Sami Fakhouri, and Bill Culley, describe their R&D efforts, including shape, composition, and durability of the VERSABALL membrane, product design, product features like speed and pneumatics, and the characteristics of the VERSABALL they thought would most influence a customer to make the decision to purchase the technology.
The article abstract explains, “Recent work in the growing field of soft robotics has demonstrated a number of very promising technologies. However, to make a significant impact in real-world applications, these new technologies must first transition out of the laboratory through successful commercialization. Commercialization is perhaps the most critical future milestone facing the field of soft robotics today, and this process will reveal whether the apparent impact we now perceive has been appropriately estimated.”
It goes on to explain that the company has since closed its doors, as it was unable to develop a business out of the technology. The authors present “some of the key takeaways from the technical side of the commercialization process” and some of the lessons they’ve learned, so that other companies are able to succeed where they failed, and “maximize research impact.” It was certainly not for lack of trying: the company won prize money in nearly ten different business plan competitions, raised private investment funds, exhibited at over twenty industry trade shows, generated $500,000 in revenue from actual product sales, and was on TV numerous times. The VERSABALL even took on Jimmy Fallon for a game of beer pong on The Tonight Show!
 From the earliest prototype in 2012, to the most recent product, there were eight different design iterations of the VERSABALL. The article explains the company’s design process in fuller detail, but basically, it further breaks down how the team decided on the main aspects of the product design (various gripper sizes, speed and pneumatics), the product modularity, and its materials development, including the difficulties of increasing the jamming gripper’s membrane durability, the shape of the membrane, and the critical grain size of the material inside the ball. The article touched on the many other research efforts the company made, such as prototypes with food-safe materials and jawed finger grippers.
From the earliest prototype in 2012, to the most recent product, there were eight different design iterations of the VERSABALL. The article explains the company’s design process in fuller detail, but basically, it further breaks down how the team decided on the main aspects of the product design (various gripper sizes, speed and pneumatics), the product modularity, and its materials development, including the difficulties of increasing the jamming gripper’s membrane durability, the shape of the membrane, and the critical grain size of the material inside the ball. The article touched on the many other research efforts the company made, such as prototypes with food-safe materials and jawed finger grippers.
Their conclusion states, “While this article is not a comprehensive ‘how to commercialize’ guide, it is our hope that it can provide a brief introduction to the direction and scope of technical work that has been required in our particular experience. Commercialization is a major hurdle on the path ahead that will determine the long-term impact of the soft robotics field. We hope that many of the new technologies we have seen will have success navigating this process, and we hope that this article can be a useful point of reference.”
What a great note to end on – this really showcases just how collaborative companies, research institutions, and researchers themselves need to be when it comes to developing new and innovative technology, like 3D printing and soft robotics. If we can’t learn from the mistakes of others, and our own mistakes, we’ll never figure out what works and what doesn’t. The original soft robotics prosthetic hand that a soft robotics graduate student at Delft University of Technology (TU Delft) developed paved the way for him and his fellow students to develop a new technique for 3D printing soft robotics. So always remember to pick yourself up when you fall down. Discuss in the Empire Robotics forum at 3DPB.com.
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.









You May Also Like
nScrypt’s Ken Church on Why Additive Electronics Is Finally Finding Its Fit
For years, additive manufacturing (AM) has promised to reshape electronics. The idea has always been to print circuits directly where they are needed, add them into parts, and move beyond...
Harvard’s Jennifer Lewis Lab Is 3D Printing Artificial Muscles That Twist and Bend on Demand
Researchers at Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) have developed a new way to 3D print materials that can move on their own, bending, twisting,...
3D Printing News Briefs, May 2, 2026: Soft Robots, Agricultural Waste, & More
In this weekend’s 3D Printing News Briefs, we’ll start off with a multi-laser metal powder bed fusion 3D printer and post-processing news. We’ll end with research into soft robotics and...
Harvard SEAS Engineers Develop 3D Printing Method for Soft Robotic Components with Programmable Shapes
The world of soft robotics is still largely in its pure research phase, but the R&D landscape has started to produce examples of early-stage commercialization. Researchers have started to refine...