The 3D Printed Soft Robotics Hand Will Respond to Human Grip


I am, technically, a robot.
Robots have already become an indispensable part of our lives. Everything from a Roomba to the automatic drink machine at McDonald’s and even the 3D printers that I write about every day are all remarkably sophisticated robotics. But those are just the tip of the robotic iceberg, for instance, most of the consumer products that we use are, at some point, manufactured with robotics. A case could even be made that modern cars, with their automatic parking options, advanced steering and brake features could be classified as robots. And if Google ever makes self-driving cars a thing, the ‘could’ will easily be replaced with an ‘is’.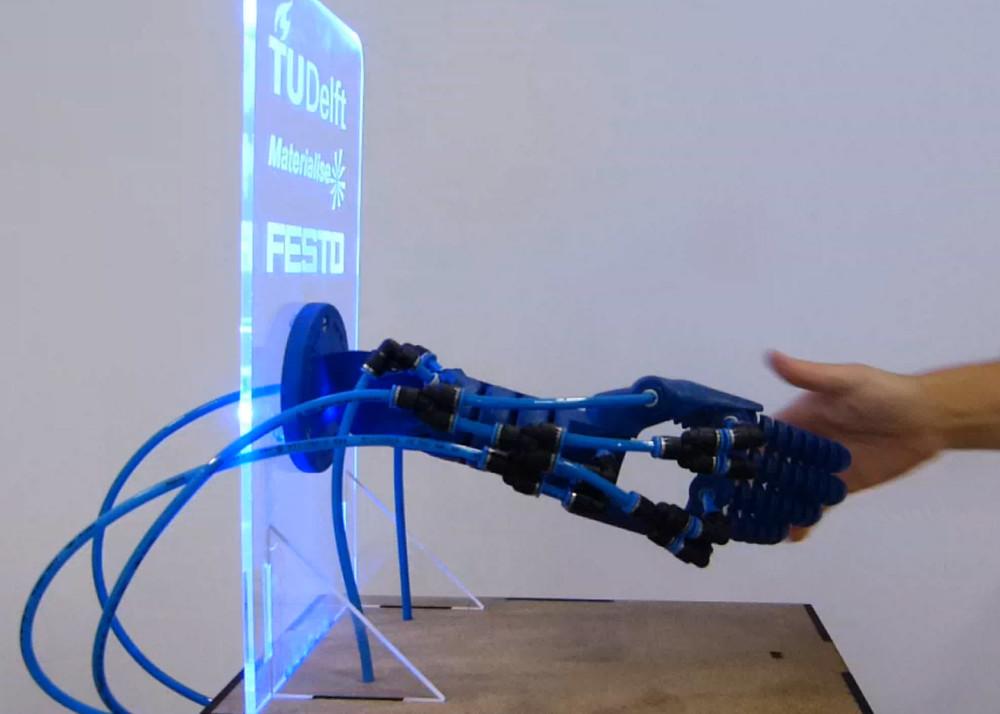
As our relationships with robots continue to evolve we’re going to have to interact with them more frequently than we already do. Currently robots tend to be things that we operate and direct, but eventually they are going to be far more autonomous and self-directing. Software is obviously going to be the driving innovation behind modern robotics, by both creating the ability to anticipate our needs, and interacting with us rather than us choosing to interact with them. But that will bring along with it the need for physical interaction, and robotics are going to also have to be designed for regular tactile contact.
Delft University of Technology graduate Rob Scharff created a soft robotic hand and arm that was designed as part of his Soft Robotics research project focusing on improving robot/human interactivity. The Dutch design student is researching ways to integrate tactile materials that are more comfortable for humans to touch with the functionality of modern robots. The soft robotic hand is made of a soft, semi-flexible material and will shake hands with someone, and even respond to their grip.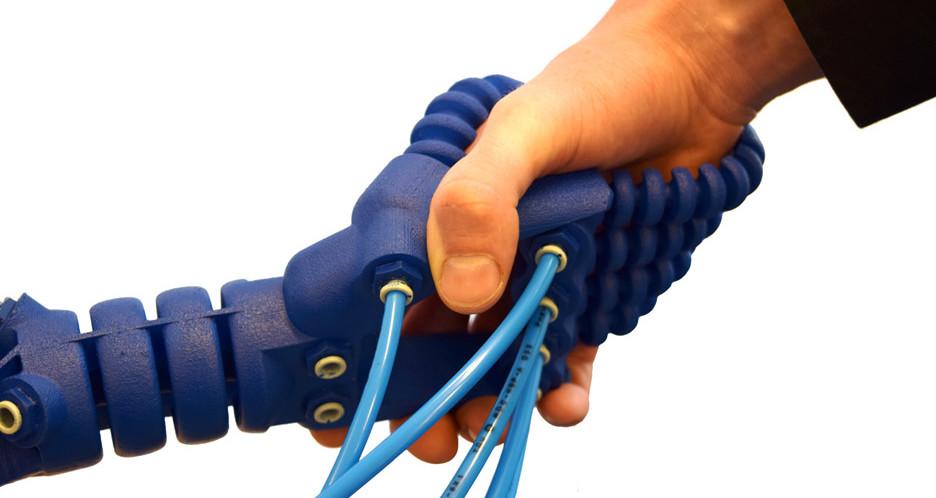
“Robots are becoming omnipresent in our lives. This makes it very interesting and important to think about robotics from a design perspective. Currently, most robots are relatively rigid machines which make unnatural movements. Soft robotics – the application of soft materials in robotics – provides a different perspective to interacting with robots,” Scharff explained to Dezeen Magazine.
 The hand works using a complicated network of small air chambers integrated inside of the hand’s palm. When someone grips the hand and shakes it, the air chambers work like bellows and the shift in the air pockets causes the hand to grip firmer or lighter depending on the grip of the human attempting to shake it. For example, if someone were to firmly grip the soft robotic hand, the hand would respond in kind with its own firm handshake. Likewise, a lighter grip results in a returned handshake that is much less firm.
The hand works using a complicated network of small air chambers integrated inside of the hand’s palm. When someone grips the hand and shakes it, the air chambers work like bellows and the shift in the air pockets causes the hand to grip firmer or lighter depending on the grip of the human attempting to shake it. For example, if someone were to firmly grip the soft robotic hand, the hand would respond in kind with its own firm handshake. Likewise, a lighter grip results in a returned handshake that is much less firm.
While developing the hand, Scharff looked to biological systems found in nature, including the complex musculature found in humans and within the structure of an elephant’s trunk. Typical animal musculature works when two opposing sets of muscles pull against each other, allowing them to become firm and manipulate the limb, organ or skeleton to induce movement. But for the soft robotic hand, the air pockets replace the musculature, by becoming firm and more solid as pressure is applied to them. The wrist can be rotated in both directions, to make the handshake feel more natural and responsive to human contact, and there are also integrated pneumatic systems within the fingers and thumb that can allow each to be independently controlled.
Here is some video of the hand-shaking soft robot:
“This shaking of hands is used as a metaphor to show how the technology can be used to improve human-robot interaction. The technology can be applied in for example orthotics, prosthetics, care robots, exploratory robots and industrial grippers,” Scharff continued.
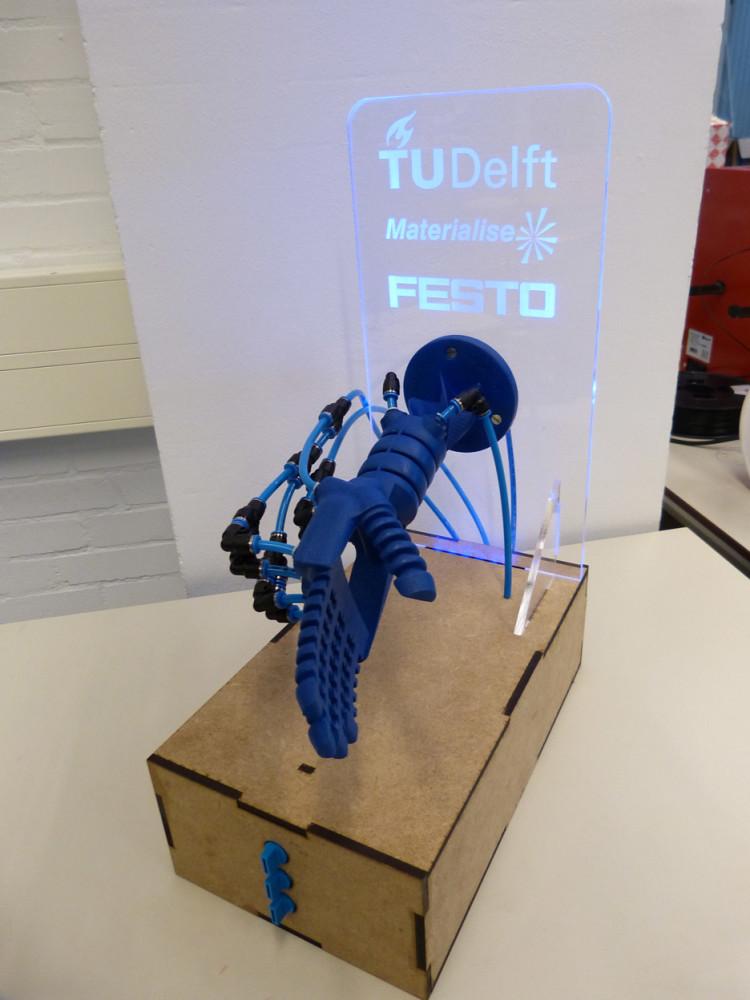 A selective laser sintering process was used to 3D print the complicated internal structure of the hand as a single piece. The powdered material, when melted together, is flexible with polyurethane-like properties. Scharff’s handshaking soft robot was shown off as part of the Mind The Step exhibition at Dutch Design Week 2015 last month, where users were given the opportunity to try it out for themselves.
A selective laser sintering process was used to 3D print the complicated internal structure of the hand as a single piece. The powdered material, when melted together, is flexible with polyurethane-like properties. Scharff’s handshaking soft robot was shown off as part of the Mind The Step exhibition at Dutch Design Week 2015 last month, where users were given the opportunity to try it out for themselves.
While currently still very much a prototype, Scharff has already started to develop the technology into his first product, a set of custom 3D printed gloves that will help stroke victims learn to grip objects again. Obviously there are also huge applications for prosthetic, and bionic limbs as well. And who knows, eventually maybe even robots that can be created to help stabilize patients being examined or help dress, clothe and feed people who are paralyzed or have severe mobility issues.
What are your thoughts on this creation? Let us know in the 3D Printed Robotic Hand forum thread on 3DPB.com.
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
You May Also Like
Gorilla Sports GE’s First 3D Printed Titanium Cast
How do you help a gorilla with a broken arm? Sounds like the start of a bad joke a zookeeper might tell, but it’s an actual dilemma recently faced by...
Nylon 3D Printed Parts Made More Functional with Coatings & Colors
Parts 3D printed from polyamide (PA, Nylon) 12 using powder bed fusion (PBF) are a mainstay in the additive manufacturing (AM) industry. While post-finishing processes have improved the porosity of...
$25M to Back Sintavia’s Largest Expansion of Metal 3D Printing Capacity Since 2019
Sintavia, the digital manufacturing company specializing in mission-critical parts for strategic sectors, announced a $25 million investment to increase its production capacity, the largest expansion to its operations since 2019....
Velo3D Initiates Public Offering in a Bid to Strengthen Financial Foundations and Drive Future Growth
Velo3D (NYSE: VLD) has been among a number of publicly traded 3D printing firms that have attempted to weather the current macroeconomic climate. After posting a challenging financial report for 2023,...