
Harvard Researchers Develop First-Ever Fully Autonomous Soft-Bodied Robot: Meet the 3D Printed Octobot


![]() The common stereotype of robots is that they’re rigid metal creatures that move stiffly and awkwardly. Obviously that hasn’t be the case for a long time – robots come in many, many different forms, but one thing they are not is soft and squishy. Right? Au contraire, says Harvard University. Researchers from the university have introduced the world’s first autonomous robot that is entirely soft – even the “circuitry.”
The common stereotype of robots is that they’re rigid metal creatures that move stiffly and awkwardly. Obviously that hasn’t be the case for a long time – robots come in many, many different forms, but one thing they are not is soft and squishy. Right? Au contraire, says Harvard University. Researchers from the university have introduced the world’s first autonomous robot that is entirely soft – even the “circuitry.”
Soft-bodied robots have been produced before, but the obstacle was always in getting them to move without either being tethered to an external control system or outfitted with hard batteries or electronics. Harvard’s partially 3D printed “octobot” requires neither, thanks to a pneumatic system developed by a research team led by Robert J. Wood and Jennifer A. Lewis of Harvard’s Wyss Institute for Biologically Inspired Engineering and John A. Paulson School for Engineering and Applied Sciences (SEAS).The study, entitled “An integrated design and fabrication strategy for entirely soft, autonomous robots,” was published yesterday in Nature.
“One long-standing vision for the field of soft robotics has been to create robots that are entirely soft, but the struggle has always been in replacing rigid components like batteries and electronic controls with analogous soft systems and then putting it all together,” said Wood, Charles River Professor of Engineering and Applied Sciences. “This research demonstrates that we can easily manufacture the key components of a simple, entirely soft robot, which lays the foundation for more complex designs.”
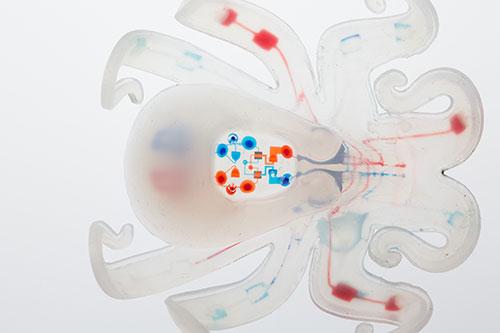
 The octobot’s body was inspired by the soft body of the octopus, and was designed in the shape of the eight-limbed cephalopod. The amazing thing about octopuses is that they have no skeleton, but they can move with speed and agility without the need for any rigid support structures, thanks to a system that involves jet propulsion for fast swimming and the elongation/contraction of their eight arms for slower crawling.
The octobot’s body was inspired by the soft body of the octopus, and was designed in the shape of the eight-limbed cephalopod. The amazing thing about octopuses is that they have no skeleton, but they can move with speed and agility without the need for any rigid support structures, thanks to a system that involves jet propulsion for fast swimming and the elongation/contraction of their eight arms for slower crawling.
 The octobot is powered not by batteries or electronics, but by simple hydrogen peroxide that, when it decomposes to gas, flows into the octobot’s limbs and inflates them, causing them to lift and flex. The chemical reaction is controlled by a microfluidic logic circuit developed by chemist George M. Whitesides, a co-author on the study. The logic circuit, which involves a series of valves, channels and fuel reservoirs, is a soft analog of an electronic oscillator, and it dictates when the hydrogen peroxide decomposes to gas – meaning that the octobot requires no external cues from humans or computers.
The octobot is powered not by batteries or electronics, but by simple hydrogen peroxide that, when it decomposes to gas, flows into the octobot’s limbs and inflates them, causing them to lift and flex. The chemical reaction is controlled by a microfluidic logic circuit developed by chemist George M. Whitesides, a co-author on the study. The logic circuit, which involves a series of valves, channels and fuel reservoirs, is a soft analog of an electronic oscillator, and it dictates when the hydrogen peroxide decomposes to gas – meaning that the octobot requires no external cues from humans or computers.
“Fuel sources for soft robots have always relied on some type of rigid components,” said Michael Wehner, a postdoctoral fellow in Wood’s lab and co-first author of the study. “The wonderful thing about hydrogen peroxide is that a simple reaction between the chemical and a catalyst — in this case platinum — allows us to replace rigid power sources.”
Below, you can see a demonstration of hydrogen peroxide reacting to a catalyst to create a flow of gas. Note that the researchers had to limit the concentration of hydrogen peroxide to 50% – a higher concentration combusts when activated.
The soft polymer octobot was created with a combination of three fabrication methods: soft lithography, molding and 3D printing. According to the research team, it’s actually quite a simple process, meaning that they can produce the bots quickly and continue to develop and experiment with them.
“Through our hybrid assembly approach, we were able to 3D print each of the functional components required within the soft robot body, including the fuel storage, power and actuation, in a rapid manner,” said Lewis, an expert on advanced 3D printing technology. “The octobot is a simple embodiment designed to demonstrate our integrated design and additive fabrication strategy for embedding autonomous functionality.”
 The research is far from complete. Right now, the octobot is fairly limited in its movements – it can pretty much just wave its arms. The next step is to create a version that can swim, crawl, and even interact with its environment – just like a real octopus.
The research is far from complete. Right now, the octobot is fairly limited in its movements – it can pretty much just wave its arms. The next step is to create a version that can swim, crawl, and even interact with its environment – just like a real octopus.
“This research is a proof of concept,” said Ryan L. Truby, a graduate student in Lewis’ lab and co-first author on the study. “We hope that our approach for creating autonomous soft robots inspires roboticists, material scientists and researchers focused on advanced manufacturing.”
Additional authors of the study include Daniel J. Fitzgerald and Bobak Mosadegh. Below, you can see the octobot in action. Discuss further in the 3D Printed Octobot forum over at 3DPB.com.
[Source: Harvard University]
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
The Drone Economy Needed a Scalable Manufacturing Backbone. ADDMAN Built One
When ADDMAN closed its acquisition of Forecast 3D in January 2026, the headlines focused on fleet size and Southern California footprint. Six months later, those metrics feel almost beside the...
The Drone Industry is Showing Where 3D Printing Delivers Real Value, AM Research Report Finds
The rapid rise of drones is creating one of the biggest opportunities for additive manufacturing (AM). Whether they’re used on battlefields, inspecting bridges or crops, or delivering supplies, drones need...
The Longevity Economy Needs a Factory
Longevity has become one of the biggest stories in healthcare. Every week seems to add a new announcement about an anti-aging therapy, an AI-powered drug discovery platform, or a startup...
The SLS Market: Game of Trucks
This is truly an exciting moment in the SLS market. With HP‘s release of the 1200 and Formlabs‘ release of the X1, we can see the SLS market heating up....































