Researchers Create a Fully Articulated 3D Printed Soft Robot Octopus Tentacle


This is, I can assure you, a scientific experiment.
I’ll be the first to admit that there is a lot of humor to be had in the fact that scientists 3D printed an articulated tentacle, and trust me the amount of effort required to avoid making shokushu goukan (do not google that) jokes is monumental. But the concepts behind soft robotics are hard to laugh at considering the potential that the field of study represents. If you don’t know what a soft robot is, it is essentially a robot without any mechanical parts that mimics the movements and behaviors of biological systems. Researchers studying soft robotics study the way that biological systems work and look for ways to apply those biological mechanisms to engineering problems.
 Yes, this specific tentacle looks a tad–well, you know–but think about what a fully articulated arm could do for something as simple as medical science. Surgeries could be conducted internally using a soft robotic operating arm able to work its way through the body’s internal structure without having to cut into muscle tissue or large parts of the human body to gain access to the affected area. Similarly they could work their way through complicated mechanics and do the same without requiring the machine to be dismantled. They could also be programned to respond like human limbs, creating truly bionic hands that work identically to the real thing.
Yes, this specific tentacle looks a tad–well, you know–but think about what a fully articulated arm could do for something as simple as medical science. Surgeries could be conducted internally using a soft robotic operating arm able to work its way through the body’s internal structure without having to cut into muscle tissue or large parts of the human body to gain access to the affected area. Similarly they could work their way through complicated mechanics and do the same without requiring the machine to be dismantled. They could also be programned to respond like human limbs, creating truly bionic hands that work identically to the real thing.
The groundbreaking research of soft robotics being conducted by Cornell University engineers has led them to developing a way to mimic the arrangement of muscle tissue in an octopus tentacle. Their tentacle is capable of a complicated range of movements previously impossible with 3D printed soft robotics. Using an elastomer material and a stereolithography 3D printer, they created a complicated set of soft actuators that allows for an unprecedented level of agility and freedom of movement. No other 3D printing method has been able to come close to to creating this level of articulation using only a single fabrication method.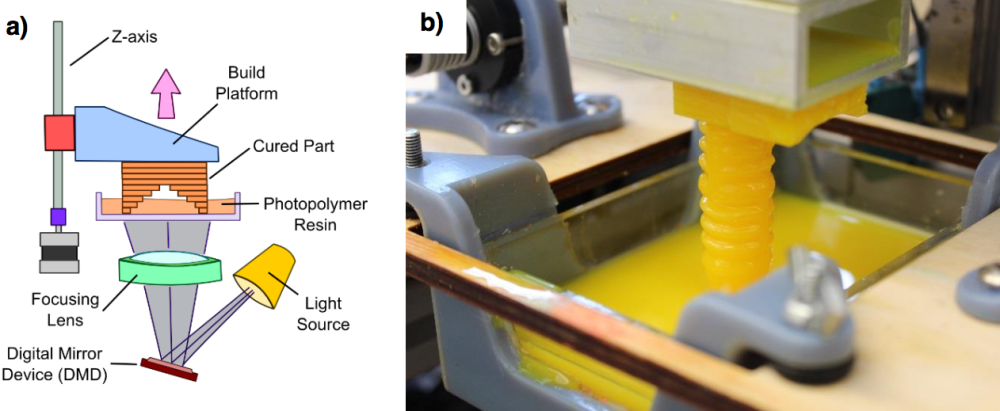
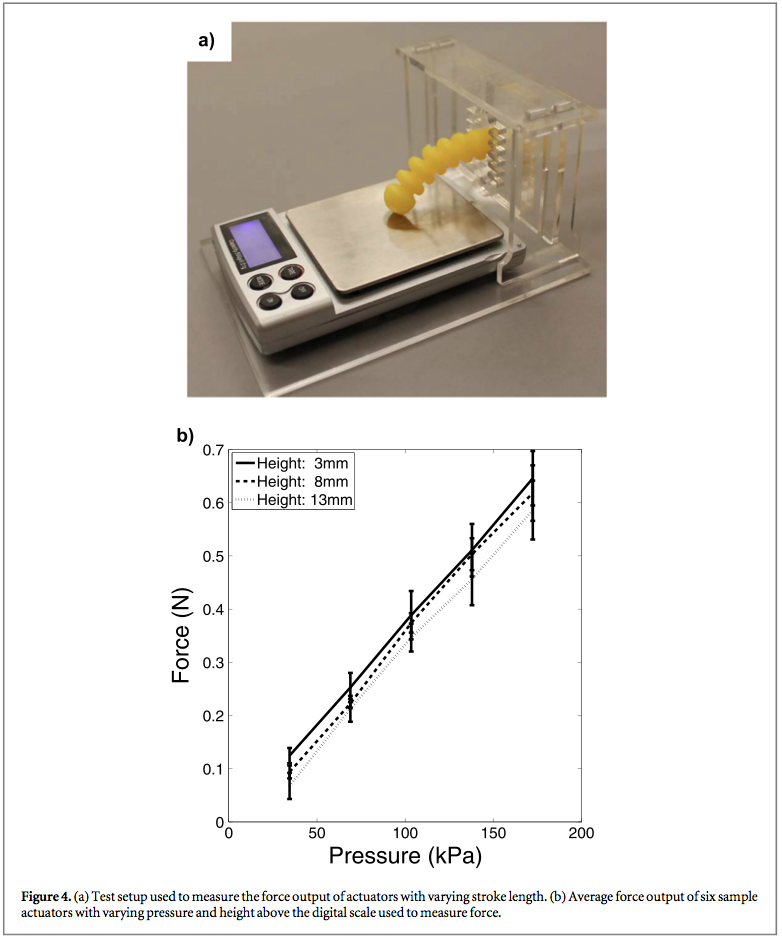
“We have developed the antagonistic actuator pairs that mimic the function (but not mechanism) of musculature hydrostats such as octopus tentacles. These pneumatically driven actuators have comparable actuation times to living muscle. Combinations of these pairs can be used to create actuation systems of arbitrary complexity that can be printed in a single process as a monolithic structure,” wrote assistant professor of mechanical and aerospace engineering Rob Shepherd in his study.
 Muscular hydrostat is the basic biological structure found in everything from the human tongue to a elephants trunk to an octopus tentacle. Although each of these limbs work in slightly different manners, they all basically rely on the way that internal cavities filled with fluid will interact with the surrounding muscle tissue. Because water basically cannot be compressed, it acts as a flexible skeleton that can be made rigid or malleable depending on the different sets of internal muscles that are working with, or against each other.
Muscular hydrostat is the basic biological structure found in everything from the human tongue to a elephants trunk to an octopus tentacle. Although each of these limbs work in slightly different manners, they all basically rely on the way that internal cavities filled with fluid will interact with the surrounding muscle tissue. Because water basically cannot be compressed, it acts as a flexible skeleton that can be made rigid or malleable depending on the different sets of internal muscles that are working with, or against each other.
Here is some video of the tentacle in action:
The 3D printed tentacle was created using a stereolithography process called digital mask projection that selectively cures the layers of resin material. It prints at a very high layer resolution and is well suited to forming highly complex internal structures, like the type that would be found inside of muscle tissue. The process leaves uncured resin inside of the structure that acts similarly to the fluid inside living muscle tissue. This allows the actuators to offer a wide range of movement similar to real musculature without the need for mechanical parts.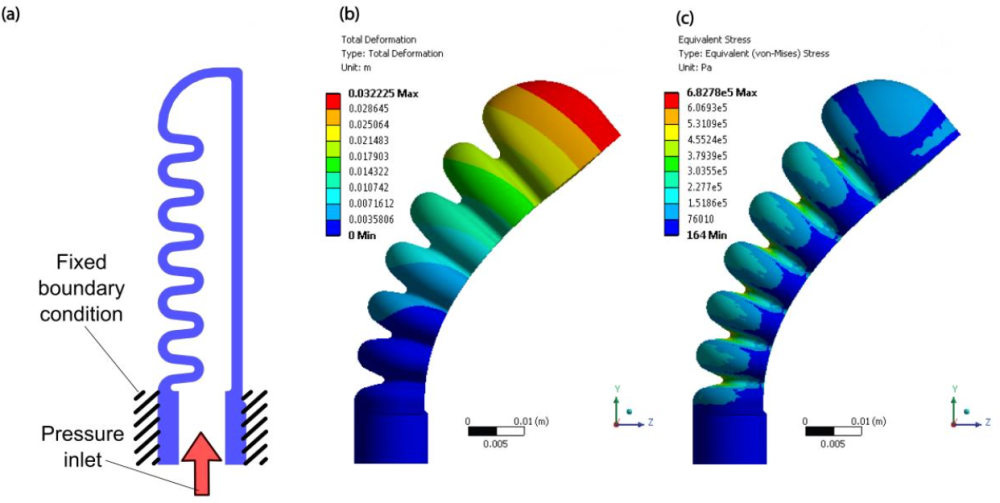
The Cornell University research team was able to develop their 3D printed tentacle with the digital mask projection stereolithography process thanks to a recent study published in the journal Bioinspiration & Biomimetics. The study, conducted by PhD student and lead-author Bryan Peele and his team of researchers, detailed the use of advanced 3D printing technology to fabricate soft actuators using commercially available flexible materials.
“A commercially available, photopolymerizable elastomeric material is identified and characterized in its liquid and solid form using rheological and tensile testing. Its capabilities for use in directly printing high degree of freedom (DOF), soft actuators are assessed. An outcome is the 40 percent strain to failure of the printed elastomer structures. Using the resulting material properties, numerical simulations of pleated actuator architectures are analyzed to reduce stress concentration and increase actuation amplitudes. Antagonistic pairs of pleated actuators are then fabricated and tested for four-DOF, tentacle-like motion. These antagonistic pairs are shown to sweep through their full range of motion (180 degrees) with a period of less than 70 milliseconds. Based on the demonstration reported here and the possibilities for improved materials, this nascent printing process for soft actuators is a promising route to sophisticated, biomimetic systems,” wrote Bryan Peele in his study.
The Cornell University research was funded by the Air Force Office of Scientific Research, 3M and the National Science Foundation. You can download the entire study as a PDF here. And you can learn more about soft robotics from the Soft Robotics Toolkit created by Harvard.
What are your thoughts on this apparent breakthrough within the robotics space? Discuss in the 3D Printing Soft Robotics forum thread on 3DPB.com.
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services







You May Also Like
3D Printing Grows to $15.9B in 2024 Amid Shifting Industry Dynamics
The global additive manufacturing (AM) market reached $15.9 billion in calendar year 2024, according to “Q4 2024 3DP/AM Market Data and Forecast” from Additive Manufacturing Research (AM Research). Despite a...
Low-cost “Suzy” Polymer Powder 3D Printer is Faster and Cheaper than Past Models
Polish laser powder bed fusion (LPBF) firm Sinterit has released a follow-up to its predecessors, Lisa and Nils, called Suzy, a $19,490 printer equipped with a 30W fiber diode laser....
BellaSeno’s 3D Printed Breast Implants Keep Shape with 87% Fat Volume, Avoids Silicone Risks
At a medical conference in Austin this week, a new kind of breast implant took center stage. It is not made from silicone but from a 3D printed, fully resorbable...
Australia’s Untapped Potential as a Disruptive Innovator: SPEE3D CTO Steven Camilleri Explains Why He Wants to Make Stuff There
When I first met Steven Camilleri in 2023, the CTO of additive manufacturing (AM) OEM SPEE3D shared a quote with me from Clayton Christensen, the late Harvard professor who popularized...