
Introducing Robogami: A 3D Printable Origami Robot


 Robots and origami. Those are two things I never would have put together, but mechanical engineering professor Jamie Paik and her team at the Reconfigurable Robotics Lab, part of Switzerland’s Ecole Polytechnique Fédérale de Lausanne, have done exactly that. Introducing Robogami, which is exactly what it sounds like – robots modeled on origami. Light, paper-thin and foldable, robogamis are designed as a series of connected flat sheets with embedded actuators that enable them to move, crawl, jump and fold themselves into a compact, origami-like shape.
Robots and origami. Those are two things I never would have put together, but mechanical engineering professor Jamie Paik and her team at the Reconfigurable Robotics Lab, part of Switzerland’s Ecole Polytechnique Fédérale de Lausanne, have done exactly that. Introducing Robogami, which is exactly what it sounds like – robots modeled on origami. Light, paper-thin and foldable, robogamis are designed as a series of connected flat sheets with embedded actuators that enable them to move, crawl, jump and fold themselves into a compact, origami-like shape.
Paik, the daughter of a scientist and an artist, drew on her own artistic sensibilities and love of origami forms to create the concept of robogami.
“Unlike other robots, which need to have a fixed tasks and form at the time of design and fabrication, I want my robots to be like origami, which is very versatile with its form,” she said. “And for robots, it will be versatile with its actions, which means its tasks.”
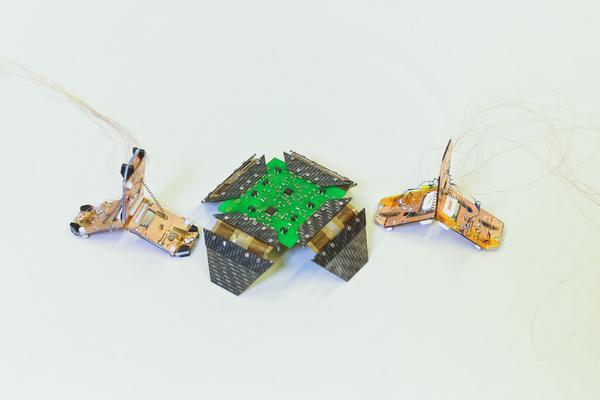 The team’s most recent robogami model, dubbed “Tribot,” was unveiled recently at the 2015 International Conference on Intelligent Robots and Systems in Hamburg, Germany. The conference is currently running until October 2nd. Tribot, unlike its predecessors, can simultaneously switch between jumping and crawling, meaning it can jump over obstacles and continue moving forward without stopping. The team was inspired by nature when creating the robot’s locomotion: Tribot’s crawling mode was based on the movement of the inchworm, while its jumping motion was based on fleas.
The team’s most recent robogami model, dubbed “Tribot,” was unveiled recently at the 2015 International Conference on Intelligent Robots and Systems in Hamburg, Germany. The conference is currently running until October 2nd. Tribot, unlike its predecessors, can simultaneously switch between jumping and crawling, meaning it can jump over obstacles and continue moving forward without stopping. The team was inspired by nature when creating the robot’s locomotion: Tribot’s crawling mode was based on the movement of the inchworm, while its jumping motion was based on fleas.
“This unusual robot can jump up to seven times its height, and it does not need to be reset between jumps,” said Paik.
Tribot is 2 centimeters tall and weighs a mere 4 grams. Its predecessor, a four-legged crawling robot, is scarcely larger. Because of their small size, conventional motors were too heavy and bulky to use for locomotion purposes. Therefore, the robogamis’ movement actuators are made from shape memory alloy, a material that is capable of remembering its initial shape after being deformed. The researchers built the actuators from nickel and titanium shape memory alloys that, when heated with electric currents or wireless micro-heaters, generate movement in different directions.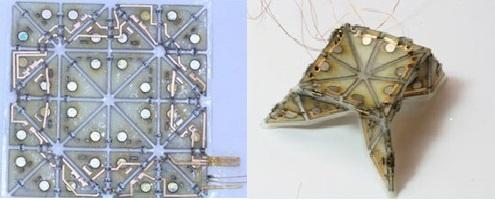
“We gave the robot numerous actuators, each of which is insulated from the others,” said Zhenishbek Zhakypov, a doctoral student who works as an assistant in the lab. “By activating the actuators successively, the robot begins to crawl. The jumping mode depends on springs that are also made out of SMA.”
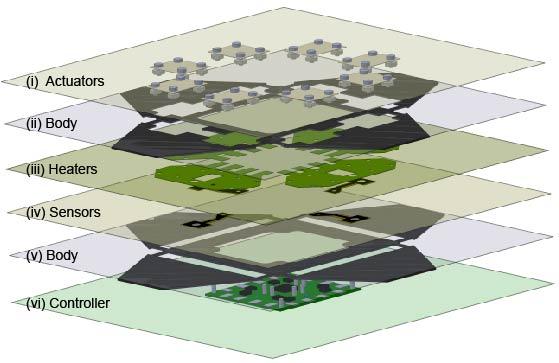
Where does 3D printing come in? When discussing how the robots could be manufactured on a mass scale, the team suggested 3D printing as an easy and quick way to manufacture the multiple layers needed to construct the robot. The layers needed to assemble a crawling robot consist of curvature sensors, SMA actuators, control circuit, and heaters for activating the SMA actuators. The layers could be easily shipped and assembled in a process that Paik compares to the assembly of Ikea furniture.
What does robogami mean for the future? A lot, potentially. Its changeable modes of locomotion and ability to react spontaneously to its environment hold potential for numerous applications: for example, it could be used to independently navigate across rough terrain, making it an invaluable resource in search and rescue missions.
“Once it has been carefully programmed, the origami sheet can self-morph into a small table, or a little house, or even an airplane…the possibilities are infinite,” said Paik.
Currently the team is working on adding additional sensors such as accelorometers and micro cameras, as well as having the robots interact with each other. You can read in more detail about robogami in a journal article co-authored by Paik and doctoral assistant Amir Firouzeh.
What are your thoughts on this robot? Discuss in the 3D Printed Origami Robot forum thread on 3DPB.com.
See robogami in action here:
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
ORNL Improves Error Mitigation in Large Polymer Parts
Oak Ridge National Laboratory (ORNL) has commercialized a number of large-format 3D printing technologies. Now, scientists are working on error mitigation in large parts. ORNL is using six thermal cameras...
Aibuild Says New FETS Simulation Tool Is 10,000x Faster for AM
Aibuild has launched FETS for Additive Manufacturing, a Finite Element Thermomechanical Simulation tool that lets you simulate stress, distortion, thermal effects, and thermomechanical effects. The solution has been optimized for...
Ceramic 3D Printing Applications on Display at Ceramics Expo USA
There’s a lot of crossover between ceramics and additive manufacturing (AM). Now, we just need to get the two industries to talk to each other more. It was nice to...
3D Printing News Briefs, April 8, 2026: LiDAR Scanning, Vapor Smoothing, FDM Optimization, & More
We’ll kick off today’s 3D Printing News Briefs with some 3D scanning news from Artec 3D, and then move on to new America Makes Project Calls. Then, Raise3D and AMT...

































