The 3D Printed OctaWorm Robot Can Go Where No Other Robot Can

Imagine a collapsed building that has been reduced to a pile of tangled rubble, steel beams and debris. Now try to imagine how many living people may be trapped under the thousands of tons of that collapsed building, clinging desperately to life. How will you reach them? How will you even know where they are? 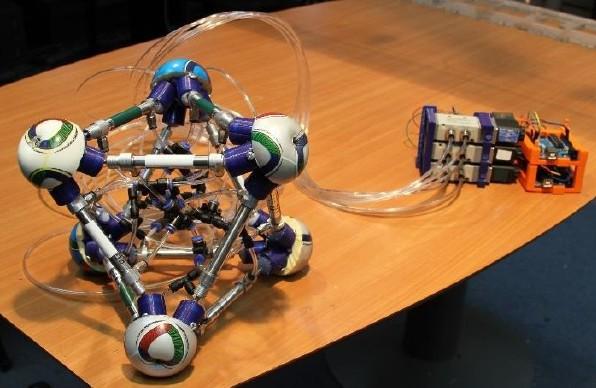 How would you even keep them alive while you shifted piles of rubble off of them? This is, of course, a problem that rescue workers have faced far too many times, and while they do their very best, even the best rescue worker will tell you that there are no easy answers for those questions, and realistically quite a few of those people trapped will not make it out of the rubble alive.
How would you even keep them alive while you shifted piles of rubble off of them? This is, of course, a problem that rescue workers have faced far too many times, and while they do their very best, even the best rescue worker will tell you that there are no easy answers for those questions, and realistically quite a few of those people trapped will not make it out of the rubble alive.
But imagine a small robot that can squeeze itself into the gaps, crevices and cracks of piles of rubble. A robot that can shift its actual size, expanding when it needs to, and constricting when things get tight. That is the concept behind the OctaWorm, a small, deformable octahedron robot that is capable of exploring and negotiating all sorts of spaces that most traditional rescue robots are incapable of traversing. The project is the result of an international collaboration between the University of Chile and the University of Akron, and OctaWorm itself was designed by Juan Cristóbal Zagal.
As the director of the robotics laboratory at the University of Chile in Santiago, Zagal is charged with creating and developing new types of robotic mechanisms and technology. The goal of the OctaWorm project is to develop a new way to use robotic motion to access and navigate confined spaces such as cracks and voids found in disaster environments, as well as pipes and air ducts. Zagal also envisions tiny, future versions that can be used for medical applications, such as navigating inside of the human body. Although robots of that size are quite a ways away from the current prototype, the design is remarkably scalable.
Check out this video of OctaWorm working its way through a pipe:
“The current version of the robot is capable of traveling inside a pipe. It is also capable of dealing with changes on the internal diameter of the pipe. The functional symmetry of the robot allows it to travel along T, L and Y joints in pipelines. Traditional in-pipe robots have many problems for dealing with these types of junctions. In contrast the deformable octahedral robotcan simply squeeze into junctions,” Zagal told us via email.
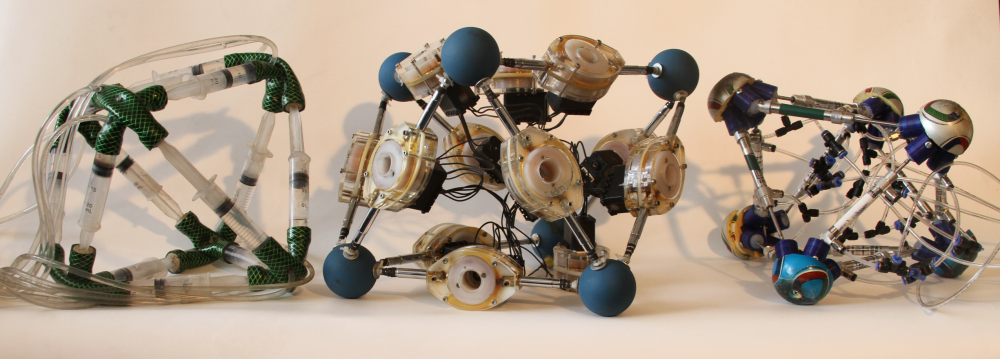
All three OctaWorm prototypes
The OctaWorm that you see in the video is the third prototype of the deformable robot, and it has gone through a lot of changes since Zagal and his team’s first attempt. The first two iterations of OctaWorm used syringes to move the joints into place that were run with small hydraulics while the joints on the second used electronic actuators. The current version upgraded the joints to much more reliable pneumatic driven servo motors. While the robot currently is operated via a wired controller created by Zagal and his University of Akron partners Jeff Davis and Daniel Deckler, eventually OctaWorm will be controlled wirelessly.
 The basic structure of the robot itself is constructed with mostly 3D printed parts and some aluminum rods to add durability to the legs. It is run with an Arduino board, an Arduino-compatible shield that controls the relays and three pneumatic 5-way solenoid valves. Because the robot is pneumatically driven, Zagal also used high-quality rapid pneumatic connectors and durable plastic tubing to connect it to the controller. But of course the star of the show, and the key to being able to make a working prototype, are the 3D printed components.
The basic structure of the robot itself is constructed with mostly 3D printed parts and some aluminum rods to add durability to the legs. It is run with an Arduino board, an Arduino-compatible shield that controls the relays and three pneumatic 5-way solenoid valves. Because the robot is pneumatically driven, Zagal also used high-quality rapid pneumatic connectors and durable plastic tubing to connect it to the controller. But of course the star of the show, and the key to being able to make a working prototype, are the 3D printed components.
“The use of 3D printing was critical for producing joinery parts that allow connecting the linear actuators. We also used 3D printing for producing high definition ball joints. The ball joints were fabricated using a Stratasys Objet 3D printer. The remaining 3D printed parts were produced with an FDM 3D printer,” Zagal explained.
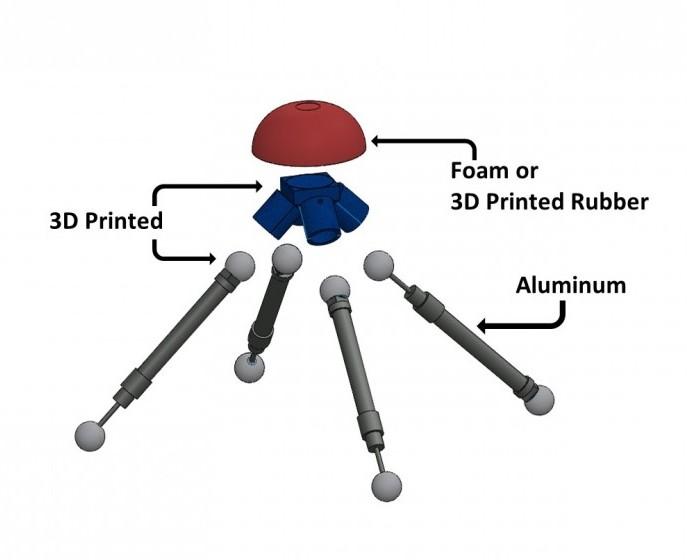 The rubbery balls on the end of each leg is what provides OctaWorm with the ability to grip onto and traverse through a wide variety of terrains and materials. The 3D printed ball joints control the deformation motion, and allow it to assume a wide variety of shapes and configurations, allowing it to squeeze into virtually anywhere.
The rubbery balls on the end of each leg is what provides OctaWorm with the ability to grip onto and traverse through a wide variety of terrains and materials. The 3D printed ball joints control the deformation motion, and allow it to assume a wide variety of shapes and configurations, allowing it to squeeze into virtually anywhere.
Just imagine rescue workers equipped with an army of OctaWorms, each outfitted with an infrared camera and medical equipment. They could be set loose in a disaster area and explore the ruins looking for signs of life. A fleet of small, inexpensive OctaWorm robots could potentially save countless lives that could otherwise be lost while waiting for rescue workers to find them by randomly digging through rubble. They could even be outfitted to carry small parcels of water or medical supplies to help trapped survivors last long enough to be saved.
You can read more about the OctaWorm project over on Juan Cristóbal Zagal’s website, and make sure that you let us know what you think of this new pipe-crawling robot over on our 3D Printed OctaWorm Robot forum thread at 3DPB.com.
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.










You May Also Like
Metal Powder Supplier Elementum 3D Added to $46B Air Force Contract
Elementum 3D, a Colorado-based developer and supplier of metal powders used in additive manufacturing (AM), announced that the company has been added to the vendors list in the fourth on-ramp...
Ursa Major Lands $28.6M AFRL Deal for 3D Printed Draper Engine Flight Demo
The US Air Force Research Laboratory’s (AFRL’s) Rocket Propulsion Division at Edwards Air Force Base has awarded a $28.6 million contract to Ursa Major for follow-on work related to the...
3D Printing Financials: Rocket Lab’s Record-Breaking Year and Over 20 Launches Coming in 2025
Rocket Lab (Nasdaq: RKLB) closed 2024 with its best year yet. The company launched more rockets, signed more contracts, and expanded deeper into spacecraft and satellite production than ever before....
US Air Force Taps Beehive to Study 3D Printed Jet Engines
Propulsion 3D printing firm Beehive Industries secured a contract from the U.S. Air Force Life Cycle Management Center through SOSSEC. SOSSEC is a company that manages Other Transactions Authority (OTA)...