
Plants Offer Inspiration for 3D Printed Porous Material Leading to Modern, Fluid Robotics


 Ironically, as robotics may be perceived by some at first glance as suspect, cold and calculating machinery, still futuristic and slightly threatening–its most basic truth is that it’s a technology created by humans for humans. And in the case of some recent engineering where robotics are taken to the next level of technology with the use of advanced 3D printing–ironically, the concept is completely organic in its beginnings, as well as offering a model that’s more pliant and fluid for manipulating movement.
Ironically, as robotics may be perceived by some at first glance as suspect, cold and calculating machinery, still futuristic and slightly threatening–its most basic truth is that it’s a technology created by humans for humans. And in the case of some recent engineering where robotics are taken to the next level of technology with the use of advanced 3D printing–ironically, the concept is completely organic in its beginnings, as well as offering a model that’s more pliant and fluid for manipulating movement.
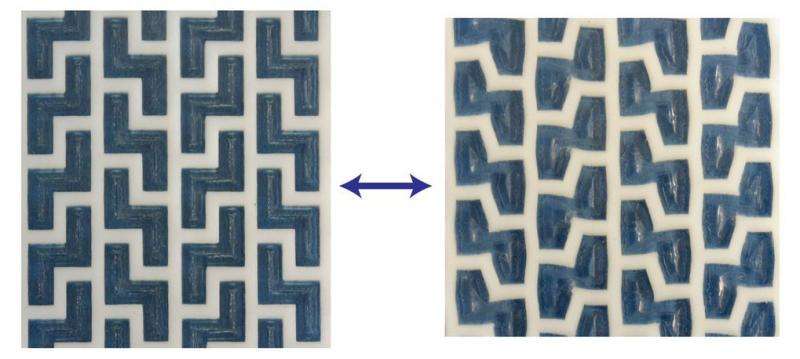
3D printed actuator uses honeycomb structure inspired by plants. Credit: Advanced Materials Interfaces/MPI of Colloids and Interfaces
Often, nature does take us by the hand in offering up inspiration. While sometimes the light bulbs go off during the pure act of clearing the head and enjoying a swim, walk, or run, it can also be gleaned quite satisfactorily in taking a closer look at the miraculous and intricate mechanisms of life around us. All it takes is a spark, the firing of some synapses, and as one neuron flows to another, a new evolution is born with a simple idea that can often open doors to a new era.
The most recent and groundbreaking research and development regarding 3D printing and robotics happening today at Max Planck Institute of Colloids and Interfaces in Potsdam and Harvard University in Cambridge is inspired by what looks simple enough: plants.
Belied by their silent, seemingly still, and noble existence, plants offer a complex cellular system and framework of processes that can, apparently, also be applied to something as mechanical and seemingly rigid as actuators and motors for robots. And the parallels being drawn are absolute genius, coupling innovative 3D printing to create smart and porous materials that react due to pressure and swelling–just as seen in some plant tissues–causing them to move a particular–and desirable–way.
“We can precisely control the nature of macroscopic expansion by means of the shape and arrangement of the cells,” says John Dunlop, who heads the Biomimetic Actuation and Tissue Growth Group in the Biomaterials Department of the Max Planck Institute in Potsdam. “We now have a very flexible lever which we can use, for example, to shape and move components in a highly defined and characteristic manner.”
Feasibly allowing for intuitive robotic movement, this concept mimics how plants release their seeds, closing capsules–or expanding them–due to good or bad conditions for proliferation. In nature, weather and resulting humidity offer moisture that in turn causes pressure from water absorption–engaging plant life to release (or retain, depending on the plant) seeds. In their research paper, ‘The Geometric Design and Fabrication of Actuating Cellular Structures,’ recently  published in Advanced Materials Interfaces, authors , , and
published in Advanced Materials Interfaces, authors , , and
“… a relevant example can be found in the actuating seed capsules of ice plants (family Aizoacea),” states the team in their research paper. “Each capsule consists of five chambers enclosed by five leaflets, which are actuated by highly swellable hygroscopic keels. Upon contact with sufficient liquid water, large directional strains of up to 300% are achieved in the keels, thus opening the capsule and enabling subsequent seed release. This active tissue has a regular, honeycomb-like structure with anisotropically shaped cells, filled with a highly swellable cellulosic inner layer (CIL).”
Following the idea of the honeycomb structure, the researchers imitated this concept simply by designing and 3D printing a porous material inspired by the tissue of the plants. Examining three honeycomb dynamics, they were able to make their own eight-sided shape offering “a steplike structure” with a hinge-like concept that allows the cells to expand, transform, and morph efficiently according to pressure, or release therein.
The engineers worked with scientists and colleagues from Harvard for the actual 3D printing. Using a multimaterial 3D printer they were able to reproduce the desired honeycomb design. Then, the engineers used a solvent to successfully experiment with creating pressure and the desired expansion and movement scenarios.
“One possible method for mechanically actuating honeycombs is to inflate the SUs either via pressurization as in typical pneumatic/hydraulic actuators, or via a swellable medium, as in the ice plant seed capsules,” the researchers stated further in their paper. “If we consider a SU of a honeycomb as a framework of beams and joints, there are two possible mechanisms of expansion of the SU. Either one, the SUs maintain their shape and increase their perimeter, or two,they maintain their perimeter length and change their shape.”
The project is still in the research and development phase, the team points out, but this 3D printed material has the potential to assist in creating a new world of robotics, using smart materials to throw out the notion of clunky, lumbering electronic machines. 3D printed, porous polymers are an entirely new concept for this technology, using the idea of organic processes to cause movement.
Ironically, the general idea right now is that these robotics may prove to be even stronger and more productive than those of their earlier, electronic prototypes. Perhaps with the miracle of science and the magic of 3D printing, we are on the precipice of entering the age of the gentle, organic robot. While solid applications for the 3D printed materials remain to be developed, this inspiration derived from the fairly perfect world of plant life looks promising.
Discuss your thoughts on this organic new application for 3D printing in robotics in the 3D Printed Porous Material for Robotics forum thread over at 3DPB.com.
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
Excellent Desktop Injection Molding, Made in Italy by Robot Factory
I was captivated when I saw my first Robot Factory 3D printer. The robust, precise machine was built to last. And this was in an era of very flimsy, disposable,...
Pogačar & Fairlight Cycles Show Us Low Cost 3D Printed Components for Bikes
There has been a lot going on in 3D printing for bicycles over the years. The most successful implementation so far is in bicycle seats. Carbon 3D printed seats are...
3D Printing News Briefs, June 18, 2026: Reseller, Relocation, Metal Space Powder, & More
We’ll start with business news in today’s 3D Printing News Briefs, as XJet appointed a value-added reseller in Germany, BIO INX is expanding its presence in the Italian market, and...
Researchers Combine AI and Bioprinting to Create Tiny Blood Vessel Networks
If 2026 has a theme in bioprinting, it may be blood vessels. Researchers can already print incredibly sophisticated tissues. The harder part is keeping those tissues alive. Without a network...































