Carnegie Mellon University Student Designs 3D Printed Crab Robot


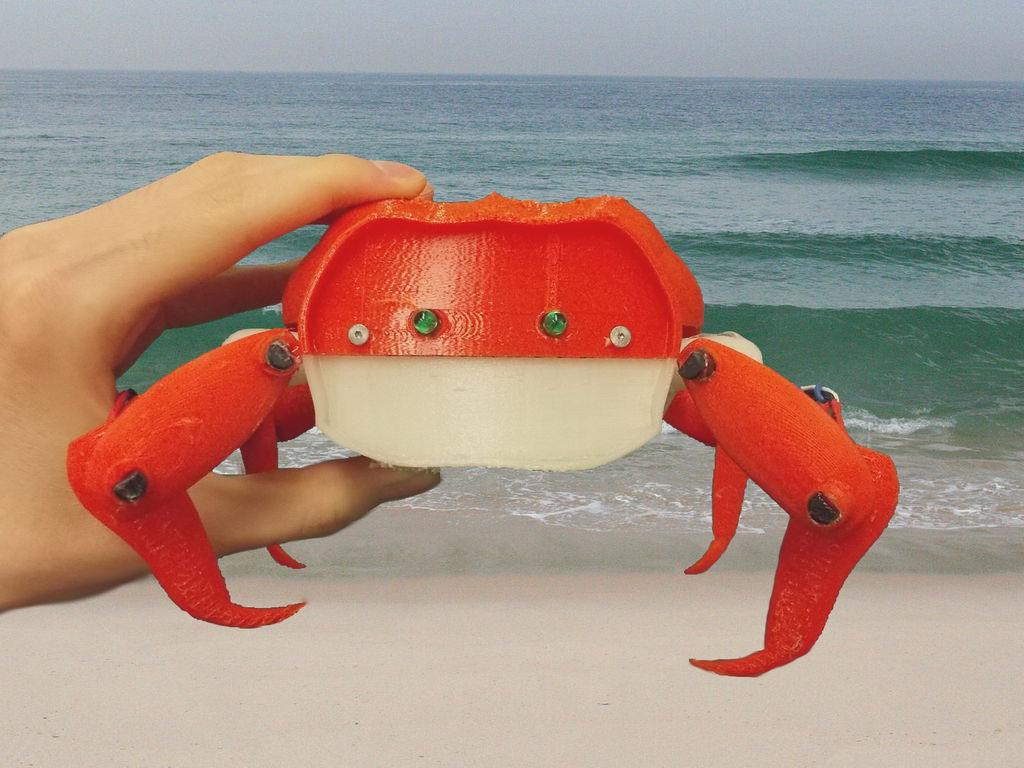
We frequently report on developments in the field of robotics when they involve 3D printing. The latest and, arguably, one of the more unique projects comes from Carnegie Mellon University Computer Science and Arts major John Choi. Choi, currently a sophomore at CMU in Pittsburgh, PA, designed a 3D printed robotic crab. The robotic crab is actually a posable input joystick for controlling tetrapod walkers, simulations, and motion capture.
What does that mean? Watch the video!
Basically, Choi’s Crab Controller has four legs and, he notes, “three degrees of freedom per leg.” It sends data through an Arduino Mega via the Standard Firmata protocol to another device. In his video, Choi demonstrates how the Crab Controller can be used to control an underwater virtual crab simulator in real time. Choi connects the Crab 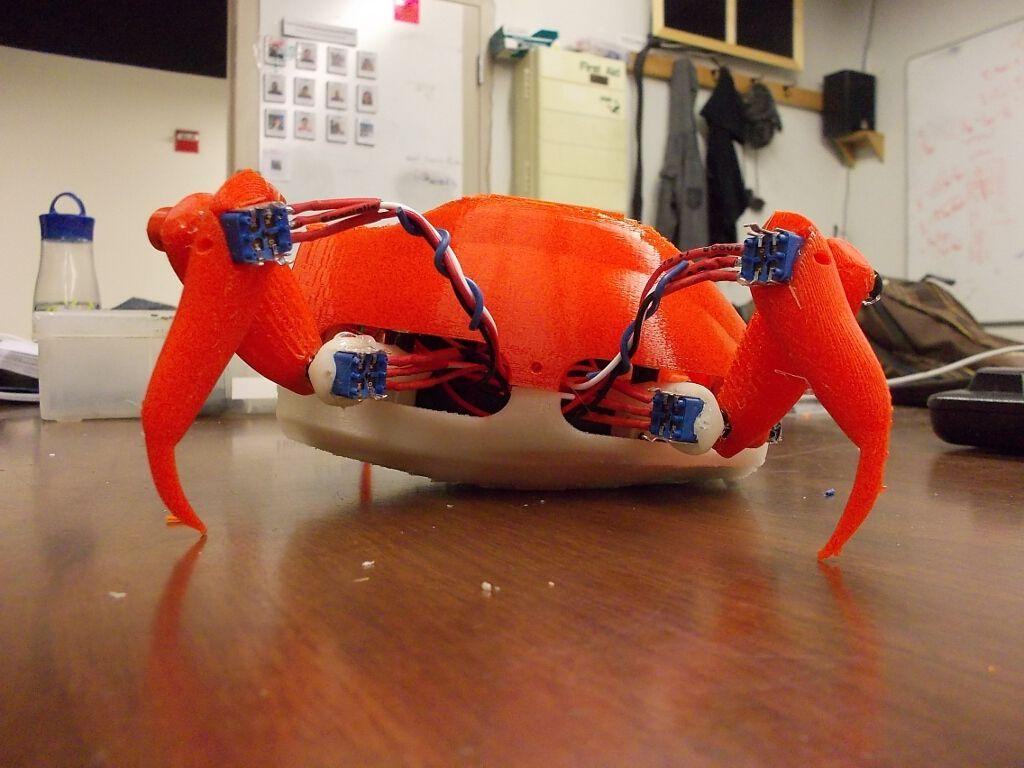 Controller to his laptop and then begins moving the legs of the Crab. The virtual crab on the screen responds with just a brief delay as Choi directs its motion across the virtual sea floor.
Controller to his laptop and then begins moving the legs of the Crab. The virtual crab on the screen responds with just a brief delay as Choi directs its motion across the virtual sea floor.
Choi designed what he calls the “Crab Controller and Crab Simulator” for the Interactive Art and Computational Design course. In fact, he specializes in designing and constructing robots and creating video games and combines the two media.
He explained his career choice, “I chose this major because robotics and video games are extremely multidisciplinary fields that require skills in almost every aspect of engineering as well as a strong sense of artistic design.”
Choi has taken on his own education as well. In the past seven years, he’s taught himself mechanical, electrical, and software design in addition to game development. He’s developed a keen sense of what’s involved in creating, managing, and leading innovative software and hardware projects both in collaboration with other innovators and on his own.
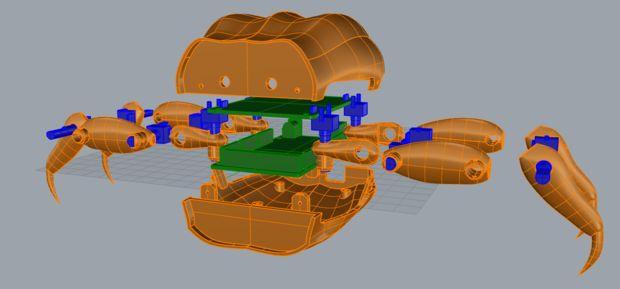
CAD view in Rhino
Choi has posted the project on Instructables and the .stl files are available on GitHub. To make the device, he estimates that you’ll spend about $60 to $80 and it will take you about a week to assemble it. He provides excellent, detailed, step-by-step instructions that involve 3D printing, programming, calibrating, assembly, soldering, and wiring.
For this pretty complicated project, you’ll need the following parts (Choi provides links for most of them on his Instructables page):
- Arduino Mega 2560
- Large Perf. Board
- 12x Rotary Potentiometer
- 2x 330 Ohm Resistor
- 2x 5mm LED
- Male/Female Jumper Wires
- Breakaway Headers
- Stranded Core Wire (recommended at least 4 colors)
- 3D Printer Filament
- 2 – 56×3/8 Screws
You’ll also need heat shrink, hot glue, and solder plus a number of tools: A soldering iron, a hot glue gun, a screwdriver, a heat gun, and pliers. Of course, you will need a 3D printer but if you don’t have one of your own you can upload the .stl files to a web-based 3D printing service like Shapeways or i.materialise or find a nearby 3D printer via 3D Hubs.
In addition to being incredibly bright and innovative, Choi is apparently a generous proponent of 3D printing. He has entered his Crab Controller and Crab Simulator in several contests that reward winners with a 3D printer.
“If I win a 3D printer,” he said, “I will donate it to a middle or high school that does not have access to 3D printing technology.”
A noble thought from a fun project! Let us know if you’ll vote for his creation or make your own version in the 3D Printed Crab Robot forum thread at 3DPB.com.
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
Creality Marks 12 Years with KliTek and AI-Powered Ecosystem Expansion
For 12 years, Creality has advanced accessible 3D printing technologies, enabling global users to turn ideas into tangible creations. What began as a desktop 3D printer manufacturer has evolved into...
Asia AM Watch: Creality Launches $177M Hong Kong IPO as HKEX Trading Debut Nears
Creality has formally launched its Hong Kong initial public offering (IPO), marking one of the biggest public market moves by a 3D printing company in 2026 and offering a new...
How AtomForm’s 12-Nozzle System Cuts Multi-Color FDM Transition Waste by Up to 90%
Pull up the print stats on multi-color FDM jobs. The number that stings isn’t time; it’s material efficiency. On six-color models, single-nozzle systems consume significant filament during transition flushing, expelling...
3D Printed Weapons Keep Showing Up in Crime
In the past few weeks, activity around 3D printed weapons in the U.S. has increased across several fronts. States including California, Colorado, New York, and Washington are moving forward with...