Yale OpenHand Aims to Create a Simplified Design to Spur Innovation for 3D Printed Robotic Hands

 There have been a few notable projects intent on developing affordable and open-source robotic hands, but when Yale University takes on the problem, you can expect some startling results and a high profile for the work. While the commercially-available robotic hands on the market can be expensive and developed for specific uses and hardware platforms, the Yale project is aimed at creating hand designs based on work done in the open-source community.
There have been a few notable projects intent on developing affordable and open-source robotic hands, but when Yale University takes on the problem, you can expect some startling results and a high profile for the work. While the commercially-available robotic hands on the market can be expensive and developed for specific uses and hardware platforms, the Yale project is aimed at creating hand designs based on work done in the open-source community.
 Called the Yale OpenHand Project, this initiative uses rapid-prototyping techniques and hopes to encourage greater design variation and innovation in the mechanical hardware field.
Called the Yale OpenHand Project, this initiative uses rapid-prototyping techniques and hopes to encourage greater design variation and innovation in the mechanical hardware field.
The team at Yale say the key to success is to develop those robotics for functional use.
“Hands developed through this project are designed to be minimalistic and rugged, especially appropriate for iterative design and operation in unstructured environments,” says the Yale team.
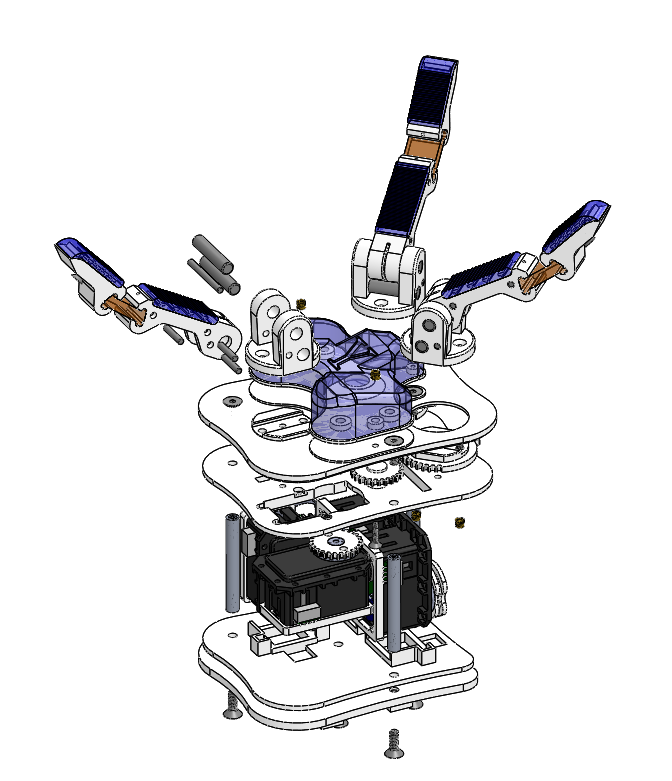
Thus far, the OpenHand designs feature tendon-driven, underactuated fingers which have been shown to improve simple grippers by “adaptively conforming” to the surface of objects. They do so by avoiding the need for sensors or complex feedback systems, and the Yale design paradigm separates the actuation and finger elements. They says this will allow for a greater degree of customization.
Using what the team calls, Hybrid Deposition Manufacturing, the process uses resin casting and 3D printing to create multi-material, monolithic structures. It’s this casting of the flexible joints and fingerpads which Yale says “increases robustness and minimizes the required number of fasteners.”
 HDM utilizes additive manufacturing processes such as FDM 3D printing with material deposition and embedded components to produce multi-material parts and systems. Yale says they can be used for robotics, mechatronics, and articulated mechanism applications. The technique can be used to print both permanent components, and sacrificial molds, to improve the robustness of the parts and speed design iterations.
HDM utilizes additive manufacturing processes such as FDM 3D printing with material deposition and embedded components to produce multi-material parts and systems. Yale says they can be used for robotics, mechatronics, and articulated mechanism applications. The technique can be used to print both permanent components, and sacrificial molds, to improve the robustness of the parts and speed design iterations.
One of the projects coming out of OpenHand, what they call the Model T42, uses a pair of underactuated, flexure-based fingers which are driven independently by either a Dynamixel or hobby servo.
Another, the Model O, is essentially a construct which is based on the hand topology found in commercially-available robotic hands from Barrett, Robotiq, and Schunk. The Model O is based on work Yale did with with iRobot and Harvard on the iHY hand. That project won the DARPA ARM program award.
The OpenHand project is led by Professor Aaron Dollar of the department of Mechanical Engineering at Yale. Also on the projects are Raymond R. Ma, Dr. Lael Odhner, Dan Rathbone, Josh LePine, Tyler Smith and Steven Rofrano.
The results of the project were published in a paper entitled “The Highly Adaptive SDM Hand: Design and Performance Evaluation” in the International Journal of Robotics Research, and in a paper entitled “A Modular, Open-Source 3D Printed Underactuated Hands” which was published as part of the IEEE International Conference on Robotics and Automation.
What do you think of projects like RoboHand and the OpenHand Project at Yale? Let us know in the Innovation for Robotic Hands forum thread on 3DPB.com.
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
You May Also Like
Profiling a Construction 3D Printing Pioneer: US Army Corps of Engineers’ Megan Kreiger
The world of construction 3D printing is still so new that the true experts can probably be counted on two hands. Among them is Megan Kreiger, Portfolio Manager of Additive...
US Army Corps of Engineers Taps Lincoln Electric & Eaton for Largest 3D Printed US Civil Works Part
The Soo Locks sit on the US-Canadian border, enabling maritime travel between Lake Superior and Lake Huron, from which ships can reach the rest of the Great Lakes. Crafts carrying...
Construction 3D Printing CEO Reflects on Being Female in Construction
Natalie Wadley, CEO of ChangeMaker3D, could hear the words of her daughter sitting next to her resounding in her head. “Mum, MUM, you’ve won!” Wadley had just won the prestigious...
1Print to Commercialize 3D Printed Coastal Resilience Solutions
1Print, a company that specializes in deploying additive construction (AC) for infrastructure projects, has entered an agreement with the University of Miami (UM) to accelerate commercialization of the SEAHIVE shoreline...