

Israeli Engineer Creates ‘Charlie’, His Second 3D Printed Robotic Insect — Plans Crowdfunding Campaign



Jonathan Spitz
Robotics and 3D printing seem to be on a path of convergence. This can be seen in two different ways. On one hand, 3D printers are being used to customize and construct robots. On the other hand, robotics will eventually play a role in the development of more sophisticated 3D printers and perhaps even production facilities of numerous printers, all managed by robots.
If you recall, back in September 3DPrint.com covered a story about a Hexapod Robot named Billy. Billy was the creation of an Israeli engineer and PhD student named Jonathan Spitz. Spitz created Billy at the Faculty of Mechanical Engineering at the Technion, Israel’s Institute of Technology.
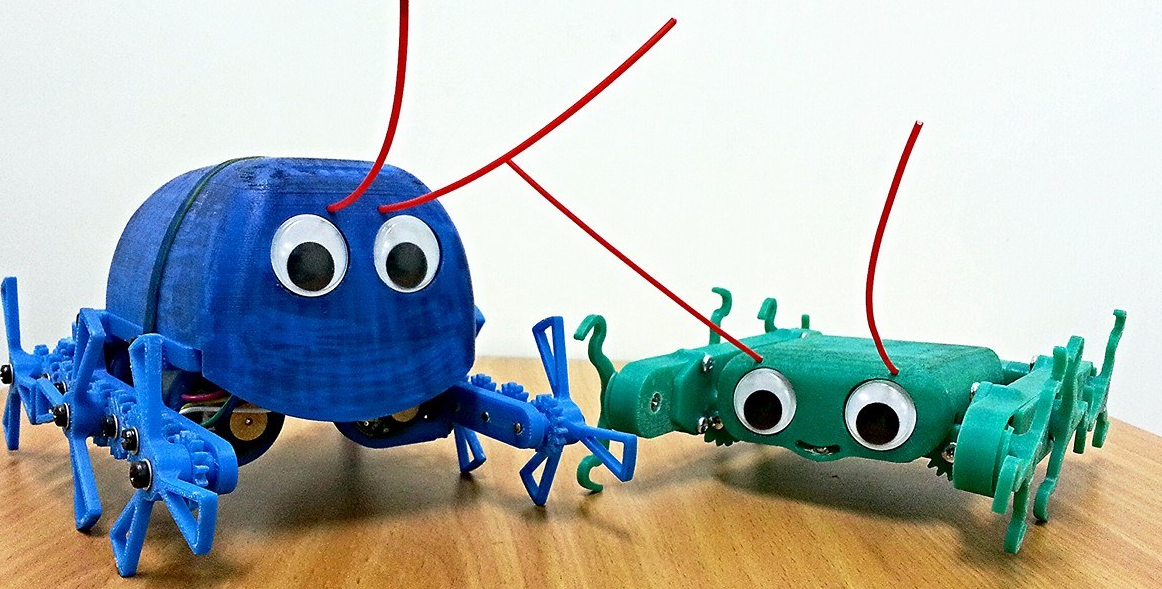
Billy (left), Charlie (right)
Billy, although he was a sight to be seen (check him out in the image to the right), still was not perfect according to Spitz. As Billy was Spitz’s first real 3D printed robotic creation, he thought he could perhaps do even better, by creating a sleeker, faster, and more versatile robotic insect.
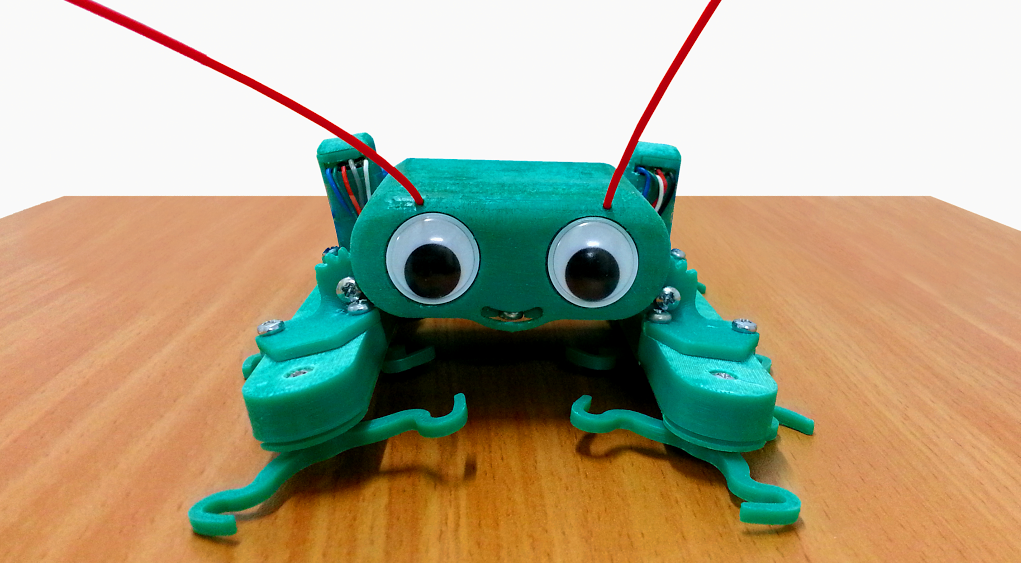
“Following the success that I had with creating Billy, the blue beetle, with 3D printing, I decided to take what I learned and create an improved version of the robot,” explained Spitz to 3DPrint.com. “That’s how Charlie the cricket was born.”
If Billy is a minivan, then Charlie would be the sports car. Charlie’s vital organs include four micro DC motors, of which two are used for walking, while the other two are meant for sprawling. Charlie’s brain consists of an Arduino Micro, which receives command signals from his central nervous system, represented by a Bluetooth module. These command signals are then relayed to the Pololu Baby Orangutan controllers which drive the motors. By using this setup Spitz was able to free up the Arduino to take care of processing data, letting the Baby Orangutans manage the closed loop motor control.
As for the design improvements of Charlie versus Spitz’s original robot Billy, he explains:
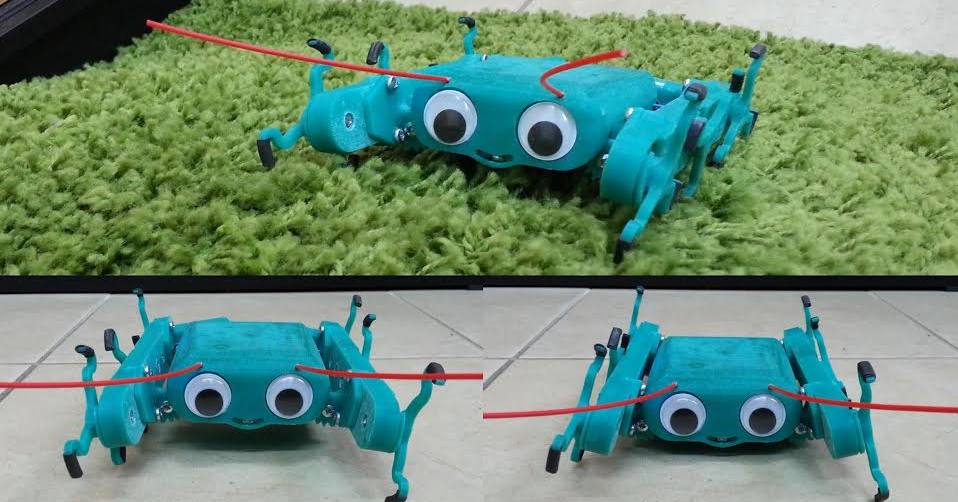
“All of Charlie’s gears are now encased in a single housing with an easy to remove lid. This provides quick access to the gears and legs for swapping and at the same time protects the gears from dust, pebbles or other stuff that might get picked up on the way. Sprawling (rotating the legs sideways) allows him to use two locomotion modes: a fast mode for flat terrain and a slower mode for clearing obstacles. I built an obstacle course in my office, which Charlie cleared without problems. He can climb slopes of over 45 degrees and clear obstacles almost as tall as himself! Also, since he’s much slimmer than Billy, he can walk upside down, in case he falls over.
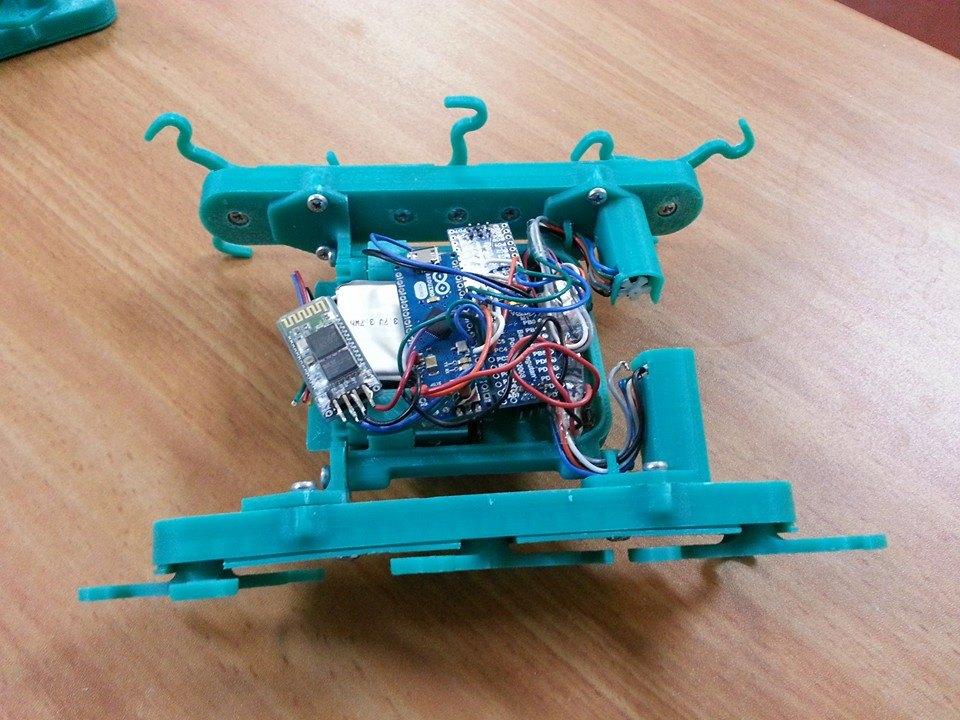
Charlie’s Vital Organs
Charlie was 3D printed on an UP2 machine from Easy3D using only ABS material. The design and contruction of this robot took Spitz about three months, as he had to figure out just how to fit all the components into such a tight space. When it came time to print the robot out, it only took him two attempts to get the parts just right. The entire robot was printed out in approximately 24 hours, which falls slightly under the time it took to print out Charlie’s brother, Billy.
Spitz is now turning his attention to a possible business model for his creations.
“Now that my robot building skills are more mature, I’m looking for the best way to bring these cute robots to market,” Spitz told us. “I’m working on some games that you can play with a single Charlie or many robots, and then I’ll prepare the whole idea for crowdfunding. 3D printing will definitely be involved but I’d rather keep those plans secret for now.”
We will be watching closely for Spitz’s next move, as his plans seem rather interesting. Stay tuned for updates regarding his possible crowdfunding campaign. Let’s hear your thoughts on Charlie in the 3D Printed Robotic Insect forum thread on 3DPB.com. Check out Charlie in action in the video below:
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
3D Printing News Briefs, June 6, 2026: Expansions, New 3D Printers, & More
We’re starting with business in this weekend’s 3D Printing News Briefs. Axtra3D just opened its expanded facility in Italy, and Austal USA expanded its leadership team. Then we’ll move on...
3Dnatives to Present ADDITIV Metals 2026: Resolving Key Barriers to Scaling Metal Additive Manufacturing
As the metal additive manufacturing sector prepares for a massive leap—with market valuations expected to climb from $6.02 billion to $7.02 billion this year—the industry is shifting its focus from...
3D Printing News Briefs, May 28, 2026: Continuous Fiber Reinforcement, Bioprinted Trachea, & More
In today’s 3D Printing News Briefs, America Makes announced the winners of its JAQS-SQ Project Call. Axtra3D is partnering with Keystone Industries to expand its dental material ecosystem, while BigRep...
DoW Accelerates Drone Readiness with AMTrain Phase 2 Launch at Camp Lejeune
Equipping today’s warfighter with the most advanced technology is paramount, driving increased prioritization and investment in drone development and advanced manufacturing training within the Department of War (DoW). In this...
































