
3D Printing for Mechanical Metamaterials: Pseudo-Mechanism Design & Multistable Units


Nitin Singh and Martin van Hecke, both researchers in the Netherlands, explore pseudo-mechanisms and 3D printing of related building blocks. Their findings are released in the recently published ‘Design of pseudo-mechanisms and multistable units for mechanical metamaterials.’
As flexible, rigid elements linked together yet displaying ‘zero-energy’ motion, mechanisms are critical to aspects such as jammed media and spring networks, playing a major role in mechanical engineering. Mechanisms are key in the design of basic robotic tools like grippers, while mechanism-based metamaterials take from such designs but are comprised of more flexible components connecting rigid parts.
‘Excited’ by external forces, a variety of unique properties may emerge:
- Negative response parameters
- Shape-morphing
- Topological polarization
- Programmability
- Multistability
- Self-folding
In pseudomechanisms we find flexible, coupled elements that display motion with low energy cost. The researchers note that they can become widespread through particle swarm optimization.
“Our central finding is that most PMs are geometrically very distinct from true mechanisms; most PMs are not simply perturbed mechanisms, but PMs permeate the design space very far away from the true mechanism subspace,” explain the researchers. “We extend our search techniques to obtain multistable units and bring these to life using 3D printing.”
In terms of systems, the research team considered groups of quadrilaterals connected by hinges. Equally-sized squares consisted of zero-mode systems underly numbers of mechanical metamaterials.
“Generalizations, including to regular tilings of alternatingly sized squares, rectangles or 3D, are well known,” stated the researchers. “The condition for such collections of quadrilaterals to form a mechanism are simple.”

(a) Full unit consisting of nine rigid quadrilaterals (1-9), connected by twelve flexible hinges {x12, x23, . . . } (circles). This unit can also be seen as four connected four-bar linkages Li. (b) Diluted unit. (c) Depending on the design of quadrilaterals (1-8), the characteristic motion of the diluted unit, D(θ), can be (nearly) constant (i), a monotonic function (ii) or a non-monotonic function (iii).
Design by particle swarm optimization included an algorithm meant to decrease cost function, identifying ‘deep minima’ in a rugged landscape—using a ‘swarm’ of particles meant to represent numerous designs.
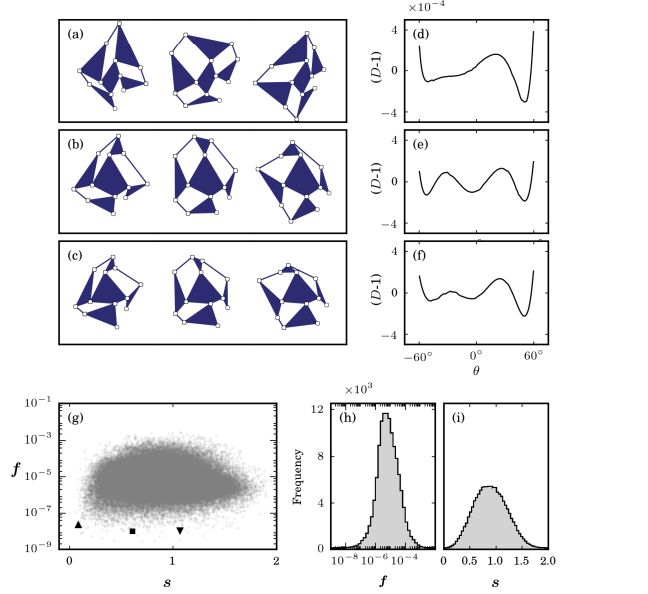
(a-c) Three examples of diluted units for which D(θ) is nearly constant and equal to 1, for θ ∈ [−60◦, 60◦], for [f, s] =2.26 × 10−8, 0.084 (a); 9.88 × 10−9, 0.611 (b); and 1.04 × 10−8, 1.06 (c). The three snapshots in each panel correspond to θ = −60◦, 0◦ and 60◦. (d-f) Corresponding plots of D − 1 vs θ; notice the scale. (g) Scatter-plot of f vs s, where uptriangle, square and downtriangle symbols indicate the parameter values shown in panels (a-c) respectively. (f,g) Distributions of f and s.
“Our findings suggest a complex organization of the design space. To gain insight into this structure, we have explored whether the value of f increases if a certain solution x0 is randomly perturbed,” stated the researchers. “Specifically, we generate 1000 random 24 dimensional vectors dx with each entry uniformly distributed between -1 and 1, and then calculate f(x0 + εdx) for a range of ε.”
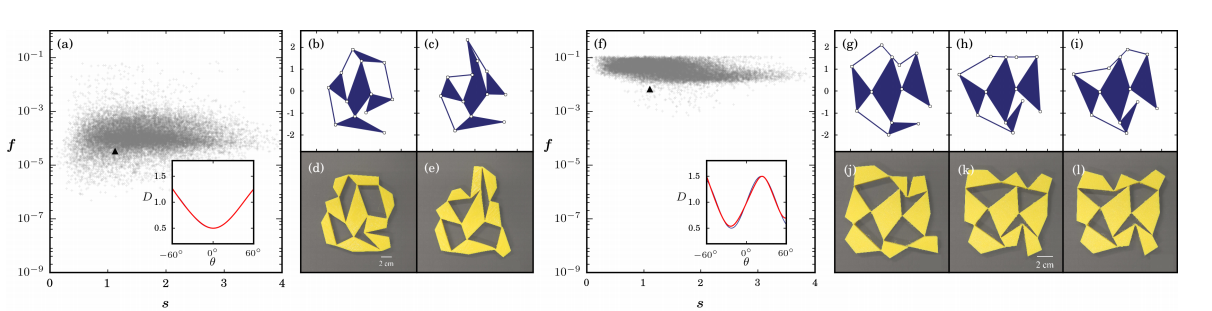
(a) Scatter plot [18000 points] of f and s for the target function Dt(θ) = 1 + 0.5 sin (2θ + π/2). Inset: The target and realized D(θ) for f = 3.2×10−5, s = 1.12 (triangle in panel (a)) are virtually indistinguishable. (b,c) Corresponding pruned unit for θ = ±60◦, where D ≈ 1 (d,e) Corresponding 3D printed flexible bistable unit in both its stable states. (f) Scatter plot [18000 points] of f and s for a target function Dt(θ) = 1 + 0.5 sin (4θ). Inset: The target and realized D(θ) for f = 6.7×10−3 , s = 1.10 (triangle in panel (g)) are virtually indistinguishable. (g-i) Corresponding pruned unit for θ = −45◦, 0◦, 45◦, where D ≈ 1. (j-l) 3D printed tristable unit in all three stable states.
“Conceptually, the step from a 2 × 3 mechanism to a 3 × 3 pseudo mechanism might be similar to that from a 3 × 3 to a 3 × 4 pseudo mechanism, but it is an open question how the design space evolves for increasingly large systems,” concluded the researchers.
“A further intriguing possibility arises for, e.g., bellows: while the volume of a polyhedron cannot change as it flexes, pseudo-mechanisms may in practice work equally well. Moreover, we wonder whether pseudomechanisms can mimic an equivalent of the topological polarization, edge-modes and cornermodes observed in topologically non-trivial mechanical metamaterials that are based on true mechanisms. Finally, our design space is only of moderate dimensions, and obtaining nontrivial designs is computationally relatively cheap. This makes our designs eminently suited to test whether machine learning techniques would be suitable to, first, be trained to distinguish ‘good’ from ‘bad’ pseudo mechanisms, second, to detect and classify multistable designs, and third, can be used to speed up the design of such structures.”
Researchers around the world continue to experiment with mechanical metamaterials, engaging in projects related to programmable robotics, 4D printing, and with a variety of alternative materials. Let us know your thoughts; join the discussion of this and other 3D printing topics at 3DPrintBoard.com.
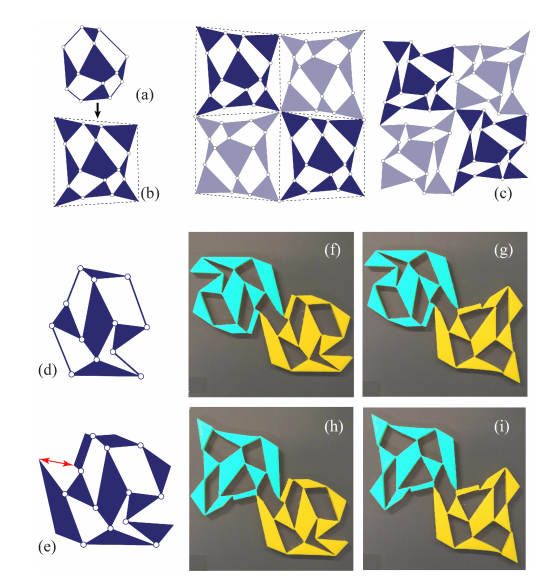
(a-b) Design of a PM augmented by replacing the outer bars by triangles. (c) A staggered tiling of such PMs has a soft hinging mode. (d) Bistable design. (e) Augmented design where gap distance (red arrow) has the same length in both stable states. (f-i) Two connected bistable 3D printed unit cells (green, yellow) can be snapped between four different stable states (false green color added for visibility).
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
AM Asia Watch: Chinese Company Claims Advances in Titanium Powder Beyond 700C
They’re a familiar sight at trade shows: Chinese powder companies with barren stands lacking parts. There’s maybe some glass vessel with powder in it and a semi-complete data sheet, but...
Aires Tide Designed with AI, Supercomputers, and 3D Printing
The Department of Energy‘s National Nuclear Security Administration (DOE/NNSA) is part of the US government that manages the US nuclear stockpile, helping to upgrade, improve, and maintain nuclear weapons, and...
Largest Publicly Announced, Single Order in EOS History: Beehive Industries Spends $50M on M4 ONYX 3D Printers
Earlier this year, Beehive Industries received a $29.7 million contract to produce its Frenzy 6 and Frenzy 8 engines for the US Air Force. The metal additive manufacturing (AM) user...
Blue Origin’s New Glenn Explosion Comes During Major Manufacturing Push
Blue Origin‘s orbital New Glenn rocket exploded during a hot-fire test at Launch Complex 36 in Cape Canaveral on May 29, setting back the company’s launch ambitions at a time...
































