
3D Printed Robotic Mesh Structures Controlled by Magnetic Fields


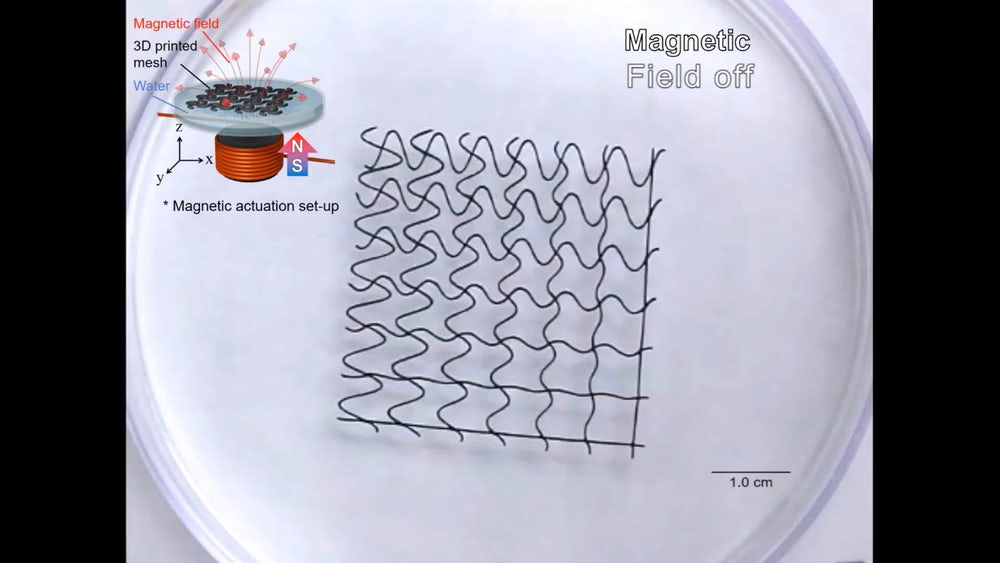
Researchers at North Carolina State University have created a new kind of robot – one that floats on water and can be controlled with applied magnetic fields. These 3D printed flexible mesh structures can grab small objects and carry water droplets, allowing them to mimic creatures living on water surfaces. They can also potentially serve as tissue scaffolds for cell cultures.
“This research shows capabilities in the emerging field of combining 3D printing and soft robotics,” said Orlin Velev, S. Frank and Doris Culberson Distinguished Professor of Chemical and Biomolecular Engineering at NC State.
The research was published in a paper entitled “3D-Printed Silicone Soft Architectures with Programmed Magneto-Capillary Reconfiguration.” In the paper, the researchers describe how they made an ink from silicone microbeads, bound by liquid silicone and contained in water. This resulted in a “homocomposite thixotropic paste” that resembles toothpaste in that it can easily be squeezed through an aperture but then retain its shape once deposited.
The researchers then used a 3D printer to shape the paste into mesh-like patterns. The patterns were cured in an oven to create flexible silicone structures that can be stretched and collapsed by the application of magnetic fields.
“This self-reinforced paste allows us to create structures that are ultra-soft and flexible,” said Sangchul Roh, an NC State Ph.D. student in Velev’s lab.
“Embedding of iron carbonyl particles, which are widely available and have a high magnetization, allows us to impart a strong response to magnetic field gradients,” added Joseph Tracy, Professor of Materials Science and Engineering.
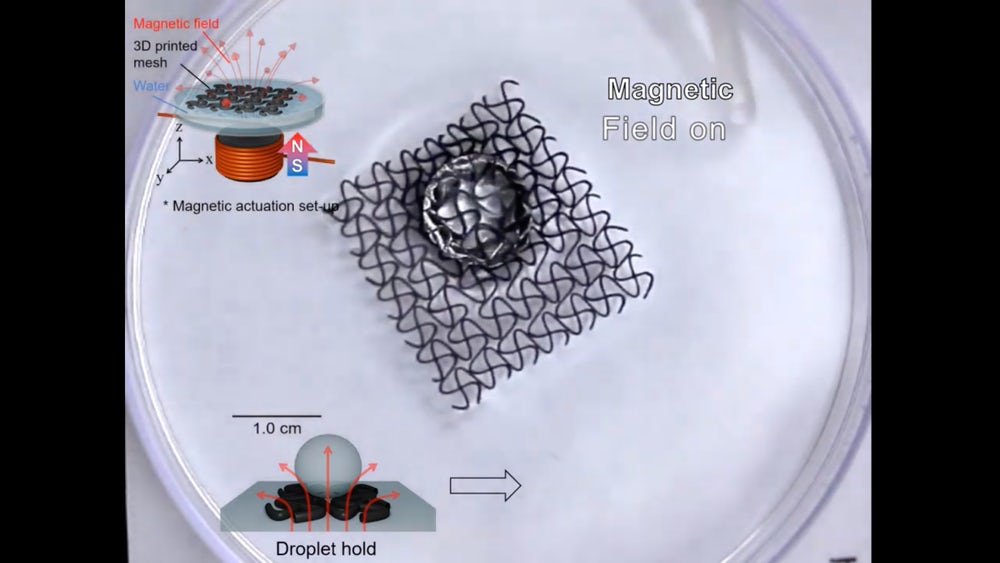
“The structures are also auxetic, which means that they can expand and contract in all directions,” Velev said. “With 3D printing, we can control the shape before and after the application of the magnetic field.”
The structures can also be used when floating on water, similar to insects such as water striders.
“Mimicking live tissues in the body is another possible application for these structures,” said Roh.

The researchers describe in the paper how they were able to create reconfigurable meshes, a structure that could grab a tiny ball of aluminum foil and a structure that could carry a single water droplet and then release it through the mesh on demand. How this worked involved the researchers turning on a magnetic field, which caused the mesh to contract towards the center and hold a droplet of water on its surface. When the magnetic field was turned off, the mesh stretched out to its full size again, letting the droplet fall through. This design could allow for the transportation of liquids and the option to mix them on demand.
“For now, this is an early stage proof-of-concept for a soft robotic actuator,” said Velev.
Authors of the paper include Sangchul Roh, Lilian B. Okello, Nuran Golbasi, Jameson P. Hankwitz, Jessica A.-C. Liu, Joseph B. Tracy and Orlin D. Velev.
Discuss this and other 3D printing topics at 3DPrintBoard.com or share your thoughts below.
[Source/Images: North Carolina State University]
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
AM Asia Watch: Chinese Company Claims Advances in Titanium Powder Beyond 700C
They’re a familiar sight at trade shows: Chinese powder companies with barren stands lacking parts. There’s maybe some glass vessel with powder in it and a semi-complete data sheet, but...
Aires Tide Designed with AI, Supercomputers, and 3D Printing
The Department of Energy‘s National Nuclear Security Administration (DOE/NNSA) is part of the US government that manages the US nuclear stockpile, helping to upgrade, improve, and maintain nuclear weapons, and...
Largest Publicly Announced, Single Order in EOS History: Beehive Industries Spends $50M on M4 ONYX 3D Printers
Earlier this year, Beehive Industries received a $29.7 million contract to produce its Frenzy 6 and Frenzy 8 engines for the US Air Force. The metal additive manufacturing (AM) user...
Blue Origin’s New Glenn Explosion Comes During Major Manufacturing Push
Blue Origin‘s orbital New Glenn rocket exploded during a hot-fire test at Launch Complex 36 in Cape Canaveral on May 29, setting back the company’s launch ambitions at a time...
































