
Actinomorphic Shape Memory Soft Robots with 3D Printed Parts Zig-Zag Through Sand and Water


 One of my favorite things about my job here at 3DPrint.com is the fact that I learn at least one new thing every single day. The first new thing I learned today is the word actinomorphic, which means something that is characterized by radial symmetry, such as a starfish or a daisy. A team of researchers based out of the University of Science and Technology of China (USTC) developed some unique robots that have soft arms actuated by shape memory alloy wires; these robots are actinomorphic as well.
One of my favorite things about my job here at 3DPrint.com is the fact that I learn at least one new thing every single day. The first new thing I learned today is the word actinomorphic, which means something that is characterized by radial symmetry, such as a starfish or a daisy. A team of researchers based out of the University of Science and Technology of China (USTC) developed some unique robots that have soft arms actuated by shape memory alloy wires; these robots are actinomorphic as well.
There are all kinds of applications for soft robotics when combined with 3D printing, from making the factory floor safer and helping people experience tactile feedback in a VR environment to creating better prosthetics and robots that can navigate through confined spaces and over rough terrain. In their experiments, the USTC team focused on the idea of locomotion for their actinomorphic robots. They recently published a paper, titled “Locomotion analysis and optimization of actinomorphic robots with soft arms actuated by shape memory alloy wires,” in the International Journal of Advanced Robotic Systems.

Actinomorphic soft robot structures. (a) Fabrication of the soft arm. (b) Actinomorphic soft robots with multiple arms.
The abstract reads, “This article presents the locomotion analysis and optimization of actinomorphic soft robots, which are composed of soft arms actuated by shape memory alloy wires. The soft arm that is a composite modular structure is actuated by a self-sensing feedback control strategy. A theoretical model was established to describe the deformation of the soft arm, combining the Euler–Bernoulli beam model of the soft arm with the constitutive model and the heat transfer model of the shape memory alloy wire. The kinematics of the actinomorphic soft robot was analyzed using the modified Denavit–Hartenberg method, and the motion equation of the actinomorphic soft robot was presented based on the quasi-static hypothesis. Results show that the actinomorphic soft robot moves with a zig-zag pattern. The locomotion of four actinomorphic soft robots with three to six arms was analyzed, and the gait parameters of each locomotion type were optimized. The optimization results indicate that the three-arm actinomorphic robot with certain gait parameters has the best performance and achieves a maximum stride length of 75 mm. A series of experiments were conducted to investigate the movement performance of the three-arm actinomorphic robot in various environments.”

Schematic of an equivalent parallel closed-chain mechanism for an actinomorphic soft robot.
The soft robots, with anywhere from three to six arms, were not entirely 3D printed. But the polygon racks, which were combined with soft arms to make up each actinomorphic robot, were 3D printed out of ABS. The soft arms were fabricated using a molding technique, along with a layering technique, and the bodies, actuated by SMA wires, were made out of PDMS; an embedded polyvinyl chloride (PVC) polymer plate was also inside the PDMS.
According to the paper, “Multiple SMA wires can be connected in a parallel or serial system. It could increase the force capabilities of the SMA actuator to connect SMA wires mechanically in parallel. However, the power supply requirement may be affected by such an arrangement. Besides, this arrangement has a negative effect on the motion of the actinomorphic soft robot for the wires at the end of the actuator. Therefore, SMA wires were arranged in M-shaped layouts with a serial manner.”
Each soft robot arm features a swing state, where the arm is off the ground, and a supporting state, where the arm is static or moving, depending on friction force with the ground. The actinomorphic soft robot can move around thanks to a series of these arm states powered by the shape memory wires.
The researchers created an equivalent parallel closed-chain mechanism in order to analyze the locomotion of the robots, and performed a series of experiments that had the little soft robots moving through a variety of environments.
-
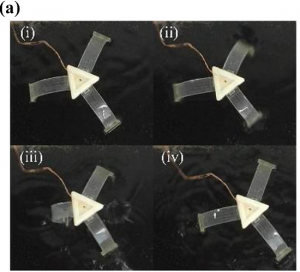
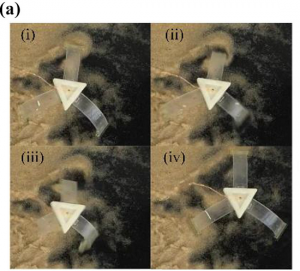
- Locomotion in a semi-submerged environment.

-
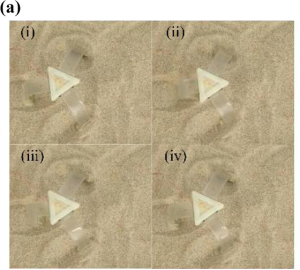
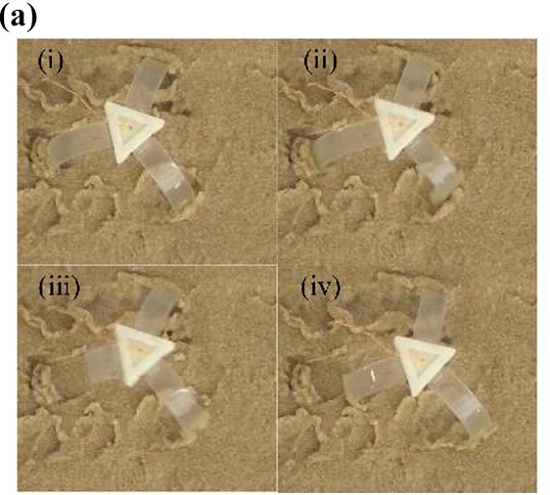
- Locomotion on dry sand.
-
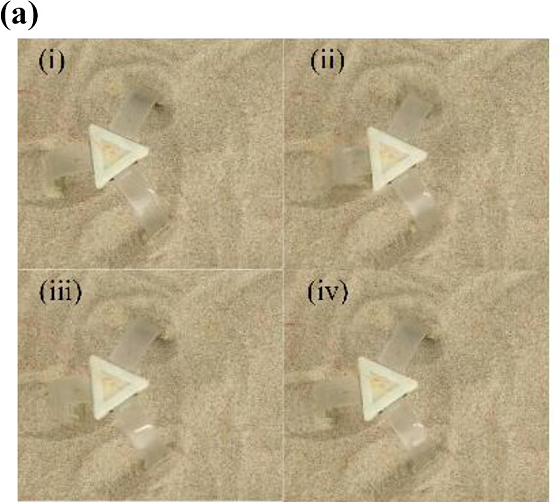
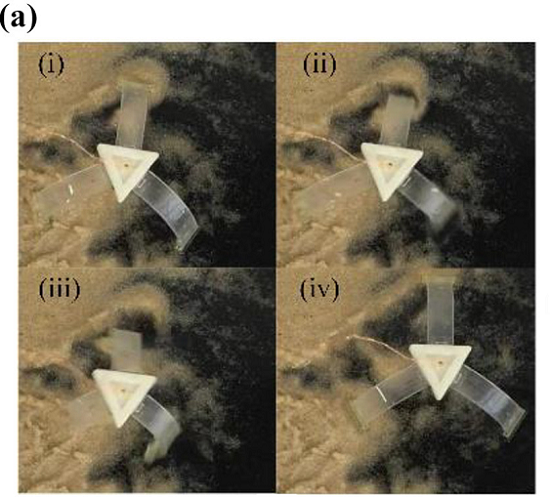
- Locomotion on wet sand.
-
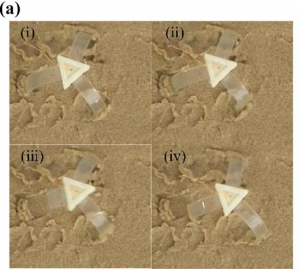
- Moving from the wet sand to the semi-submerged environment.
“The ground, the supporting arm, and the 3D printing rack with the swing arm correspond to the frame, link, and end effector of the closed-chain mechanism, respectively,” the paper reads. “The linkup between the supporting arm and the 3D printing rack is approximate to a revolute pair. The linkups between the ground and the static or moving supporting arm are the revolute pair and cylindrical and planar pair, respectively.”
Future work on these actinomorphic soft robots will include increasing their mobility and autonomy. Soft robots are a completely new way of thinking about robotics. In a soft robotic world, robots can become more efficient, cheaper, more specialized and simpler than traditional robots. These specialized and simple robots are now in their infancy waddling through sand in labs. Over the coming years we will see them emerge and start to play roles in the real world.
Authors of the paper include Chunshan Liu, Erbao Dong, Min Xu, Gursel Alici, with the University of Wollongong, and Jie Yang.
Discuss this and other 3D printing topics at 3DPrintBoard.com or share your thoughts in the comments below.
[Images: Liu et. al.]Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
Phillips Corporation Rebrands Additive Hybrid Division, Now Called Phillips Advanced Manufacturing
Phillips Corporation announced that it will rebrand its Additive Hybrid division to become Phillips Advanced Manufacturing. The focus will now be on advanced manufacturing in the broadest sense. Brian Kristaponis...
Arridex Opens Additive Manufacturing Omnifactory in Lagos for MRO & Spare Parts
Arridex, formerly known as the RusselSmith Group, has been building additive manufacturing competence and capacity in Africa for years. Previously, the company got approval to use a Roboze 3D printed...
DREAMing in Dayton: DREAM Symposium Covers AM, AI, Supply Chain, & More
This month, I attended a manufacturing industry event, like I often do. But instead of getting on a plane to New York City, or driving four hours to Youngstown, I...
ORNL Origami Creates Large Foldable Structures
Oak Ridge National Laboratory (ORNL) is using a hybrid 3D printing method to make foldable panels. At the Department of Energy’s (DOE) Manufacturing Demonstration Facility (MDF) at ORNL, researchers turned...































