
Simple, Inexpensive 3D Printed Grasping Device Makes Household Robotics More Plausible


The old adage, “If you want something done right, you have to do it yourself” has for the most part, until very recently, applied to robotics designed to undertake basic tasks in human-centered environments. In particular, substituting robots  for humans when it’s time to wash the dishes, dust the knick knacks, sweep and mop the floors, and so forth, has proven surprisingly challenging.
for humans when it’s time to wash the dishes, dust the knick knacks, sweep and mop the floors, and so forth, has proven surprisingly challenging.
Never mind that your high-tech housekeeper doesn’t look like everybody’s favorite, apron-sporting, wise-cracking, part-nanny, part-maid, Alice, from the popular, ‘70s sit-com, “The Brady Bunch,” or the pie-making, everyone’s granny, Aunt Bea who fussed over Andy and Opie. It’s unlikely that we’ll be seeing convincingly anthropomorphic robots developed in the near future, at least not for taking on basic tasks in the household, the school cafeteria, the nursing unit, or in comparable settings. In fact, it’s the simplicity of those tasks that makes the expense of going in that direction–the human-looking and -seeming robot–unnecessarily extravagant. Further, without homes that are more robot-friendly, it is difficult to operate a time- and energy-saving device like a basic automated “helper.”
But there’s another way of solving the problem, a simple one conceived of by two students in the Human Centered Robotics Lab at the University of Washington in Seattle. Zhe Xu and Maya Cakmak have created a simple and inexpensive 3D-printed adapter that allows a robot to grasp basic household tools. Robotics meets Occam’s Razor: The simplest solution, the 3D printed adapter Xu and Cakmak have dubbed, “Griple,” seems to be the ideal one.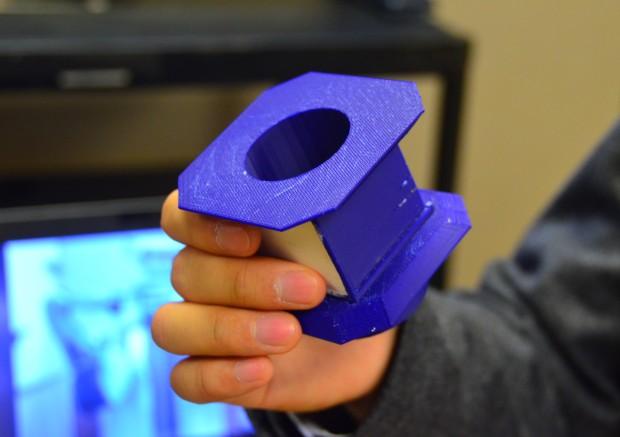
Robots like the Baxter from Rethink Robotics and the PR2 from Clearpath Robotics have the capacity to take on our unwanted, menial labor and now, this $10 device allows them to take on the three basic requirements of simple tool use: grasping, applying, and placing. With the Griple on task, the robot can be programmed (or “trained,” as Baxter’s makers parse it) to follow through on chores like dusting, mopping, folding laundry, and so on.
The UW researchers ran tests with the Griple using a PR2 robot they called “Rosie2.” The device performed basic household chores without the use of the Griple with 86% efficiency. With the Griple, Rosie2 was a stellar employee with an efficiency level topping 99%, sort of the difference between hiring someone to clean your house and having your children do it.
In its current incarnation, the Griple remains in place on a given tool once it’s installed. However, both the average cleaning implement and the Griple are so inexpensive to purchase and produce (respectively), that this really isn’t a major issue.
While seemingly rather basic, the Griple really is pretty ingenious. Recently, Xu and Cakmak unabashedly presented their invention in the more sophisticated nomenclature of science and academics: “Enhanced Robotic Cleaning With a Low-Cost Tool Attachment” at the 2014 IEEE International Conference on Intelligent Robots and Systems (IROS) in Chicago. With the help of the Griple, Rosie2 can join them in toasting their success. Is this the future of robotics? Will we all soon have robotic maids in our homes? Discuss this story in the 3D printed Griple forum thread on 3DPB.com.

[Source: IEEE]
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
The Drone Economy Needed a Scalable Manufacturing Backbone. ADDMAN Built One
When ADDMAN closed its acquisition of Forecast 3D in January 2026, the headlines focused on fleet size and Southern California footprint. Six months later, those metrics feel almost beside the...
The Drone Industry is Showing Where 3D Printing Delivers Real Value, AM Research Report Finds
The rapid rise of drones is creating one of the biggest opportunities for additive manufacturing (AM). Whether they’re used on battlefields, inspecting bridges or crops, or delivering supplies, drones need...
The Longevity Economy Needs a Factory
Longevity has become one of the biggest stories in healthcare. Every week seems to add a new announcement about an anti-aging therapy, an AI-powered drug discovery platform, or a startup...
The SLS Market: Game of Trucks
This is truly an exciting moment in the SLS market. With HP‘s release of the 1200 and Formlabs‘ release of the X1, we can see the SLS market heating up....































