
Open-Source in Action: TOIL Research Team Improves on 3D Printed Prosthetics with Motor Ability, Tactile Feedback & More


 It would seem that the idea of wearing a prosthetic was once a rather dark proposition, with only rudimentary designs available, inconveniences in getting fitted—and worst of all, expense that made attaining such a device nearly impossible to begin with. While it can be challenging enough for adults going through the process, this has often been magnified for children who might sometimes even have other health challenges accompanying the issue of a missing limb too, with numerous fittings often being an excruciating process. Even worse, by the time children receive traditional prosthetics, they may have already outgrown them, which would mean more fittings, more waiting, more expense, and a cycle that just continues miserably. It doesn’t have to be that way anymore however, and the options are anything but grim, thanks to e-NABLE and their thousands of volunteers around the world who are embracing the open-source culture to make lives better for children worldwide—and especially in developing countries.
It would seem that the idea of wearing a prosthetic was once a rather dark proposition, with only rudimentary designs available, inconveniences in getting fitted—and worst of all, expense that made attaining such a device nearly impossible to begin with. While it can be challenging enough for adults going through the process, this has often been magnified for children who might sometimes even have other health challenges accompanying the issue of a missing limb too, with numerous fittings often being an excruciating process. Even worse, by the time children receive traditional prosthetics, they may have already outgrown them, which would mean more fittings, more waiting, more expense, and a cycle that just continues miserably. It doesn’t have to be that way anymore however, and the options are anything but grim, thanks to e-NABLE and their thousands of volunteers around the world who are embracing the open-source culture to make lives better for children worldwide—and especially in developing countries.
With a host of different designs, e-NABLE is not only making it easier for children to attain prosthetics, but they’ve actually made it cool. Kids are able to show their replacement limbs off to other curious children proudly, whether they are sporting vibrant colors or even a Spider-Man or Frozen style. And while many of these 3D printed prosthetics are made and delivered for children by volunteers, many files can be easily downloaded and printed out at home by families—even including a new parametric arm just developed by volunteer designer/engineers that can be found on Thingiverse, and is able to grow with the child. The progress made by e-NABLE and all of the amazing people donating their time around the globe is truly astounding, raising an enormous amount of awareness not just for all of us, but alerting those in need that today there is a much more affordable, realistic, and sustainable route for finding prosthetics.
![]() The secret behind e-NABLE is, of course, the volunteers. And it looks like they’ve attracted some new talent. Currently, researchers at MIT Lincoln Laboratory’s Technology Office Innovation Laboratory (TOIL) have taken an interest in the world of 3D printed prosthetics—namely, arms and hands—and the work being done through e-NABLE has certainly caught their attention.
The secret behind e-NABLE is, of course, the volunteers. And it looks like they’ve attracted some new talent. Currently, researchers at MIT Lincoln Laboratory’s Technology Office Innovation Laboratory (TOIL) have taken an interest in the world of 3D printed prosthetics—namely, arms and hands—and the work being done through e-NABLE has certainly caught their attention.
The goal at TOIL is to continue improving on the 3D printed prosthetic. They are developing ways to offer better finger motion, add non-electronic temperature and tactile feedback, and add motor technology to new designs that they hope to see in use not only by the e-NABLE community but also numerous others, to include nonprofit organizations like the Wounded Warrior Project too, where those who have been injured in the line of duty are offered support. The hope is that TOIL can help create enhanced prosthetics that will fit right in with what these communities and organizations are doing currently.
“There are many people who could benefit from these devices,” says TOIL manager David Scott, “so we are using Lincoln Laboratory brainpower to improve the existing models.”
The researchers make a clear point in that while certainly many can participate in the assembly of these prosthetics, those who are developing them have a more difficult job indeed with the challenge of design, engineering, and the actual building of the parts. With David Scott acting as team leader, researchers Naomi Hachen, Luke Johnson, Keri Mroszczyk, and Samuel VanNoy began looking at how the basic 3D printed prosthetic works. They downloaded and 3D printed them using PLA and then put great focus on how the tensioning system works as users bend and straighten their wrists, and how the fingers are affected. This was where they pinpointed some limitations that they wanted to expand such as all of the fingers becoming immobile when just one finger is being obstructed—affecting the grip. This defeats much of the purpose of the prosthetic as of course a firm grip is important for so many of the basic tasks users wish to complete such as picking up cups and utensils when eating and drinking.
The team began looking for ways to allow independence among the fingers of the prosthetic, whether movement of one was blocked or not. To do this, they went back to the whippletree design that has already been used with an e-NABLE prosthetic, engaging four fingers and allowing force to be evenly distributed even when there is one area being halted or obstructed. The whippletree acts as an equalizing force, connected the fingers. In the current e-NABLE design, however, the thumb was still left out of the loop, causing the same issue upon any sort of obstruction. The researchers set out to solve that detail, creating pivoting pins which will allow all five of the fingers to move, whether or not force is being applied to one of the others.
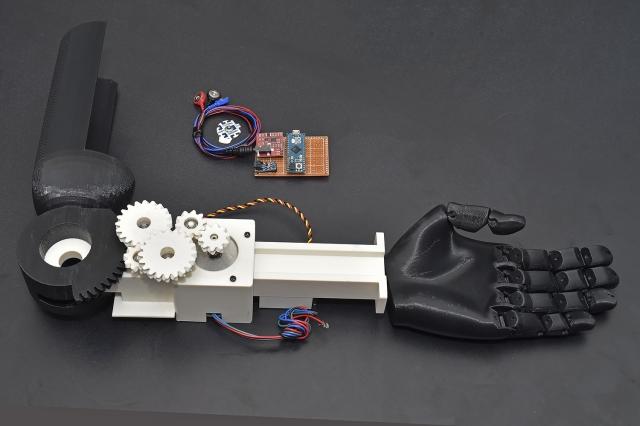
From TOIL: The mechanical arm pictured here was created for people without a wrist or arm. The herringbone gears and arm base are printed in one full piece. Once that piece is printed, an Arduino motherboard and sensors, pictured above the arm, and a motor are attached to the arm. [Photo: Tom Burbine]
“When users grasp an object, they will actually be able to feel how hard they are squeezing with their 3D printed hands,” says Hachen.
Adding the ability to monitor temperature is also a facet the team is working on. Obviously, this is a safety factor that is important but hasn’t yet been worked into prosthetic designs. While users might not actually be able to feel heat, they would be able to see it with a thermochromic filament acting as an indicator, changing color with temperature and alerting the user to a hot or potentially dangerous surface.
“It’s important for users to know whether or not a surface is hot,” says VanNoy. “If the users detect heat, they can potentially prevent personal injury and hand damage, such as melting.”
As a member of the research team, Luke Johnson is involved in creating motorized parts for the 3D printed prosthetics, and has already created an arm that can move due to the integration of 3D printed gears, motors, Arduino, and a motherboard.
“We are particularly focused on helping Wounded Warrior Project members who would benefit from a strong, mechanical prosthetic,” says Scott. “Our design can be scaled for those without a wrist to those without an entire arm.”

From TOIL: Lincoln Laboratory researcher Naomi Hachen assembles a 3-D-printed hand. [Photo: Tom Burbine]
“Different sensors can be programmed to different muscles,” says Johnson. “For example, if the user flexes her chest muscle, that movement could signal the motor to bend the elbow. If the user flexes her back, the hand could form a grip.”
The motorized features can be added to any e-NABLE prosthetics, according to the researchers, at a cost of $350 to build in. They say that currently the motorized arm can lift up to 25 pounds, but they are still testing this ability, as with the designs of the hands overall over the next few months. Once they consider the designs ready, the research team will be ready to see them distributed to both e-NABLE and the Wounded Warrior Project.
“When I saw the existing e-NABLE hands, I knew that they could be better,” says Johnson. “Since starting this project, I have gained an array of knowledge from circuitry to engineering. But the most important part of this project is helping people. That knowledge is heartwarming.”
Here we see one of the greatest examples of the open-source community at work. While communities such as e-NABLE have made tremendous strides, other designers were able to take a look as well and enthusiastically offer their own hand at looking for further enhancements. This new work is great evidence as to how those actually in need can benefit when we aren’t so worried about ownership of a design and allow for sharing—and continued improvement. Discuss these new prosthetic features over in the TOIL 3D Printed Prosthetic Enhancements forum thread at 3DPB.com.
[Source: MIT News]Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
APAC’s 3D Printing Capital Wave Is Bigger Than Venture Funding
By the usual measure, a tally of funding rounds, APAC’s additive manufacturing market had a quiet second quarter. The capital that has actually closed across the region comes to about...
HP Stock Jumps on 3D Printing Buzz
HP (NYSE: HPQ) had its best day in over a year this week, with shares jumping more than 7% on Tuesday. Interestingly, the move was quickly tied to 3D printing,...
3D Printing News Briefs, April 8, 2026: LiDAR Scanning, Vapor Smoothing, FDM Optimization, & More
We’ll kick off today’s 3D Printing News Briefs with some 3D scanning news from Artec 3D, and then move on to new America Makes Project Calls. Then, Raise3D and AMT...
3D Printing Market Hits $16B in 2025 as Growth Picks Up Again
The global 3D printing market reached $16 billion in 2025, growing just over 10% year over year, according to new data from Additive Manufacturing Research (AM Research). After a slower...
































