This Amazing 3D Printed Rover Inspired by the Martian Rover Can Go Almost Anywhere


NASA’s Curiosity rover.
When NASA designed the Mars rover Curiosity as part of their Mars Science Laboratory mission it was created to be able to go anywhere that its mission required it to in the harshest environment that they had ever designed a vehicle for. When Curiosity landed on August 6th, 2012 it was supposed to complete its mission in just two short two years. However, as with many of the space vehicles that NASA designs, it turns out that Curiosity was the little rover that could and has continued to go about its mission to this day, almost four years later. NASA has even extended Curiosity’s mission indefinitely, and it will continue to collect vital environmental information for the eventual manned mission to Mars that NASA has planned for 2020.
Part of what made the car-sized rover such a durable and long-lasting piece of technology was the basic design of Curiosity itself. The rover has six wheels, each independently powered and maneuverable, allowing it to roll over even the most uneven or rocky terrain. It also has a low profile, so most of the weight of the rover is close to the ground which can help prevent flipping, and the independent wheels have a wide range of movement so the rover can easily compensate for unexpected and severely irregular ground without tipping. Curiosity is probably one of the most efficient and long-lasting vehicles that NASA has ever designed and built.
In fact, Curiosity was a major inspiration for maker and Thingiverse user Misha Larkin who designed an amazing RC Curiosity-inspired rover that he named Moon One. Larkin posted all of the 3D printable files and assembly instructions for his all-terrain rover up on Thingiverse last year and while it looked a little more like Wall-E than Curiosity, the inspiration was obvious. Moon One was completely autonomous and with its integrated GoPro and a long distance transmitter Larkin could send it up to three miles away and still maintain complete control over it. But as happy as he was with Moon One, it didn’t take him long to find ways to improve it.
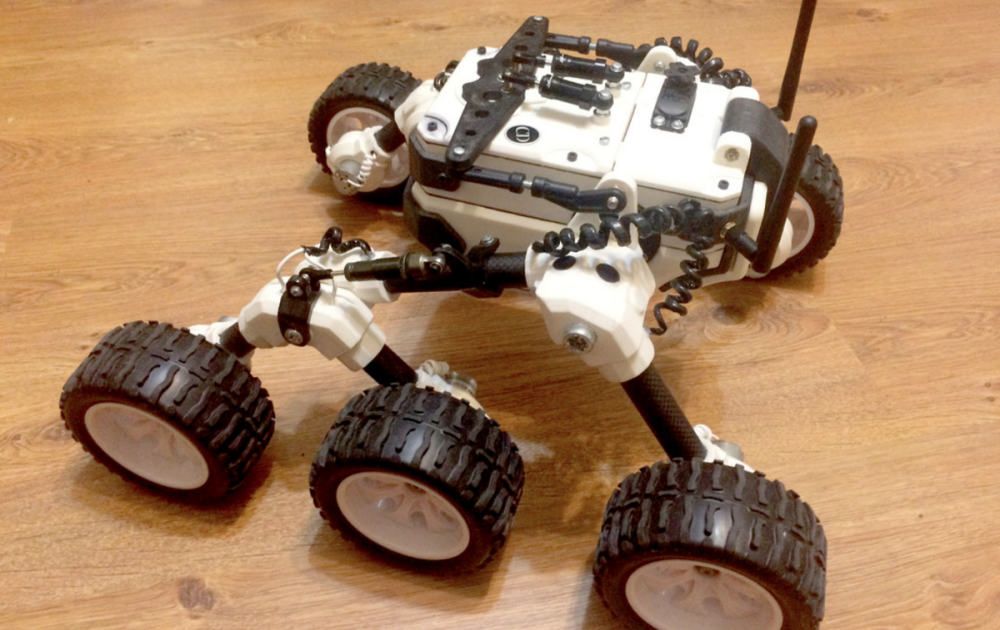
The 3D printable Martian Rover.
While Larkin intended to emulate the wheels from Curiosity, Moon One wasn’t nearly as maneuverable as he hoped and it had trouble moving over larger and more complex obstacles. So he got to work on his new Martian Rover design, and while it had a lot in common with Moon One, it ended up almost completely redesigned. This time around each wheel has its own electric motor with a dedicated gearbox, and the wheels are considerably more maneuverable. Much like the Curiosity Rover that Larkin’s new Mation Rover is based on, the configuration of the wheels allow him to send it over extremely uneven and irregular terrain.



In addition to the new wheel setup, Larkin also designed the body of the Martian Rover to be waterproof, so the RC rover can even be driven underwater. Unfortunately it’s currently winter in Moscow and he hasn’t been able to test it out live yet. Larkin also suspects that at only 2.8kg (6.17 pounds) the rover would be more likely to float than drive underwater. But the delicate electronics and the power supply are still protected from water and the local environment, so it can pretty much be driven anywhere that Larkin wants to send it.
Here is some video of the Martian Rover in action indoors while Larkin waits for Russia to melt:
All of the plastic parts for Larkin’s Martian Rover were 3D printed on his XYZprinting Da Vinci 3D printer from standard PLA. The rest of the electronics and motorized parts can be purchased from any hobby store or website that sells RC parts, and he did include a list of components with links on the Martian Rover’s Thing page. The rover is controlled with the same standard RC equipment that he used for Moon One. And like its predecessor the new rover will soon have an attached GoPro and a robotic gripping arm that will let it rove virtually anywhere.
“Control is done by ordinary RC equipment. In the future, I plan to finalize it. install robotic arm. And to establish a rotating camera. that would manage it remotely,” Larkin told 3DPrint.com.
You can find Larkin’s original rover on Thingiverse here, and you can find his new design, that is currently a work in progress, over on Thingiverse here. Discuss in the 3D Printed Rover forum over at 3DPB.com.
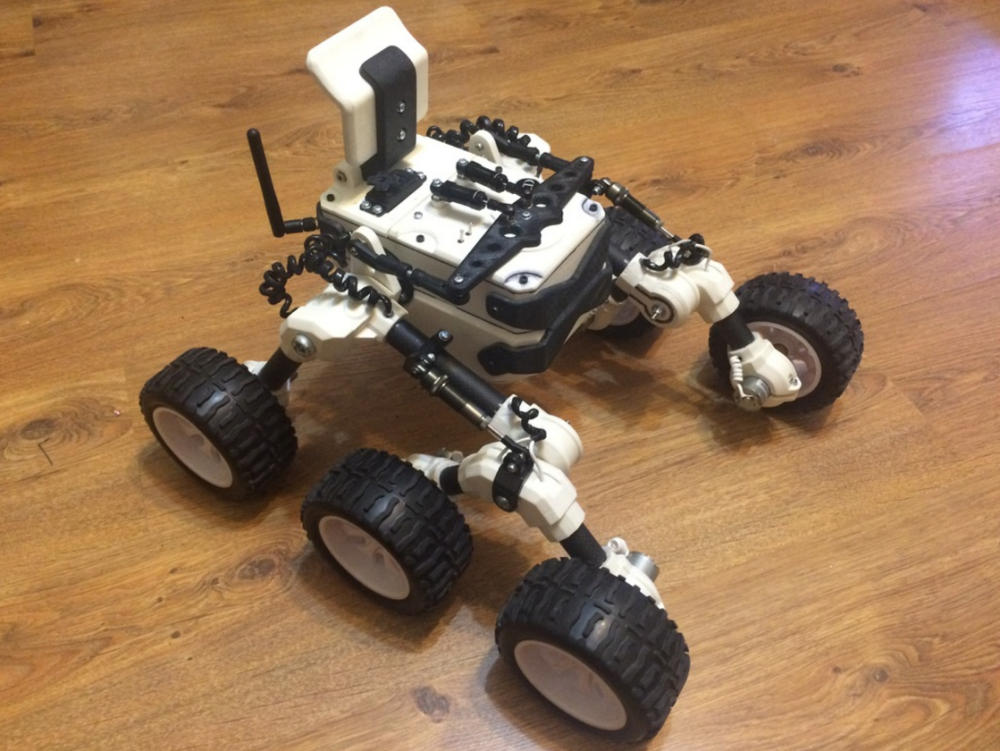
The rear hatch holds the power source and will protect it from water.
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.










You May Also Like
3D Printing News Briefs, June 11, 2025: Sustainability, Automotive Tooling, & More
We’re starting with sustainability news in today’s 3D Printing News Briefs, as EOS has strengthened its commitment on climate responsibility, and Zestep is making 3D printing filament out of eyewear...
3D Printing 50 Polymer Stand-In Parts for Tokamaks at the PPPL & Elytt Energy
Of all the world’s things, a tokamak is one of the hardest, most complex, expensive and exacting ones to make. These fusion energy devices make plasma, and use magnets to...
3D Printing News Briefs, May 17, 2025: Color-Changing Materials, Humanoid Robot, & More
We’re covering research innovations in today’s 3D Printing News Briefs! First, Penn Engineering developed 3D printed materials that change color under stress, and UC Berkeley researchers created an open source,...
Firehawk Aerospace Partners with JuggerBot 3D, Gets $1.25M from AFWERX for 3D Printed Propellants
Texas-based Firehawk Aerospace, an advanced energetic materials firm that works with aerospace and defense applications, announced a strategic partnership with JuggerBot 3D, an Ohio-based large-format 3D printer manufacturer. Together, the...