

Ongoing 3D Printed Robot Hand Project Deserves a Big Hand


 Years ago, when my older brother told me he was going into prosthetics, I didn’t know what it was. Then, once I learned about it, I quickly understood how valuable it is and admired his career choice. Creating artificial limbs to aid people is a very noble profession, and Instructables user mikey77, who has been diligently working on a 3D printed human hand replacement, should feel this way as well. I know I don’t have to waste a breath explaining to our reading audience how a 3D printed hand, complete with working silicone muscles, can be useful. Mikey77 definitely deserves a hand for all of the innovations in his latest robot hand Instructable, which builds off of past work and opens up many possibilities for future improvements.
Years ago, when my older brother told me he was going into prosthetics, I didn’t know what it was. Then, once I learned about it, I quickly understood how valuable it is and admired his career choice. Creating artificial limbs to aid people is a very noble profession, and Instructables user mikey77, who has been diligently working on a 3D printed human hand replacement, should feel this way as well. I know I don’t have to waste a breath explaining to our reading audience how a 3D printed hand, complete with working silicone muscles, can be useful. Mikey77 definitely deserves a hand for all of the innovations in his latest robot hand Instructable, which builds off of past work and opens up many possibilities for future improvements.
Mikey77 posted his Instructable for 3D printed muscles less than two months ago, and he’s back with an entire 3D printed Artificial Muscle Robot Hand “that can eventually be used as a prosthetic replacement for a human hand.” Mikey77 is the first to admit that makers may not necessarily follow suit and print and construct his whole hand, but he sees his technical process as yielding many valuable tips to be used by many. Also, he continues to tweak his technique, as he acknowledges that the fingers are a bit wobbly, but, true to form, he is now working on an arm that can hold tendons to support the hand muscles.
First mikey77 explains (Step 1) that his hand, with artificial silicone muscles, is powered by compressed air that gives it a soft touch (see below video). How did he make this hand? Let’s talk settings and materials (Step 2). Using a MakerBot Replicator 2, mikey77 printed parts and molds using PLA plastic and these printer settings: standard resolution with a raft, 10% infill, 2 shells, and .2mm layers-standard resolution. The materials he used include: Dragon Skin 20 pourable silicone (for good flexibility and pourability); 100% silicone caulk; corn starch to make Oogoo; 1/8 ” plastic tubing and 1/8″ silicone tubing; parts for his air muscle controller; parts for robot neurons; and six 4-40 x 3/4″ round head scr ews and nuts.
ews and nuts.
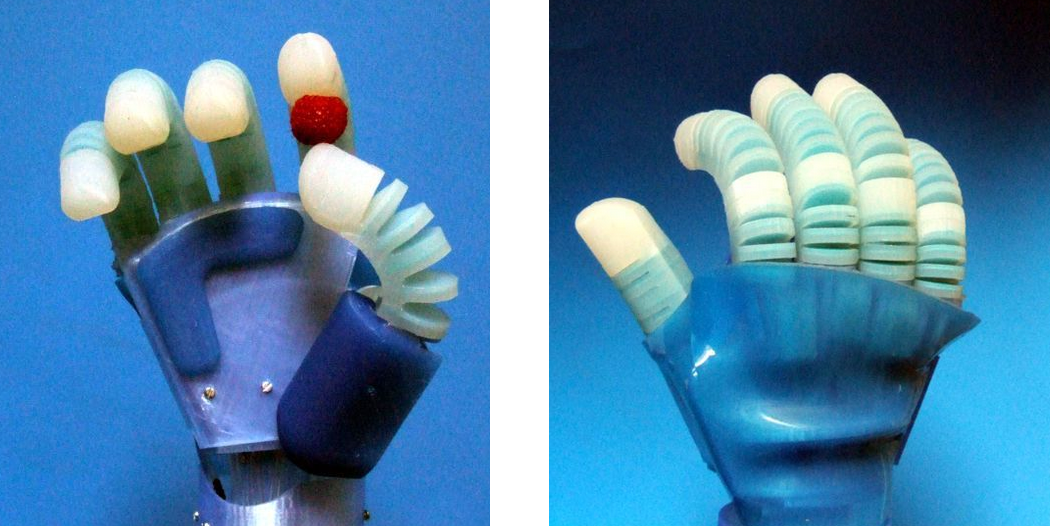
In his step-by step-technical overview, he shows how all the different hand bones are 3D printed (Step 3), which is straightforward enough. Four hand bones control four fingers and two bones control thumb muscles and bones. His next step (Step 4) is to use 3D printed break-apart molds to cast artificial muscles. Each finger is cast in one 3D printed mold, producing a finger with 3 muscles, soft bones between muscles, and a fingertip. (Each finger muscle gets power from two molded-in air channels.) Three of the hand’s fingers are the same length, allowing for one mold to be used for three fingers, and the pinky is scaled down to 90% of the other finger mold size. The thumb has its own 3D printed mold and process (Step 5) for muscle casting in silicone.
Bones. Muscles. What else does a robot hand need? Ahh. Yes! Skin. In the next step (Step 6), mikey77 explains how he cast the removable robot skin using his Skinmold.stl, and “a piece of acrylic sheet is put on top of the mold and weighted after pouring to keep the skin thin.” He includes two main kinds of molds here — palm and thumb pads — and he designed the back of the hand to slot into the bone structure’s grooves so it can be peeled back for inner access.
Next (Step 7), has already been an Instructable of its own: the pneumatic controller is able to control 11 muscles that can be pressurized at 9 psi or by applying a vacuum. The controller is created  using 13 solenoid valves and a 12 volt air compressor. Steps 8 and 9 are equally complex, as they cover the Robot Neuron Schematics and remote activated Code. But mikey77 makes it as straightforward as he can providing links to previous Instructables and an entire list of all coding.
using 13 solenoid valves and a 12 volt air compressor. Steps 8 and 9 are equally complex, as they cover the Robot Neuron Schematics and remote activated Code. But mikey77 makes it as straightforward as he can providing links to previous Instructables and an entire list of all coding.
Since mikey77 doesn’t ever seem to slow down when it comes to this ongoing project, his final Step 10 lists “Other Possibilities” which sounds like more than a hint on new Instructables we can look forward to from him in the near future: a foot powered compressor to power the muscles; finger tendons to eradicate the current hand’s stiffness; new 3D printed pressure valves that can work up to 30 psi and increase fingers’ grasping power; and, naturally, there’s always an extension to an arm that can house 4 or 5 air muscles to pull on finger tendons.
We don’t know exactly the direction this will take mikey77 and anyone else inspired by his latest Instructable, but we know we’ll be hearing from him quite soon, indeed.
Let us know what you think about this use of 3D printing in the 3D Printed Robot Hand forum thread over at 3DPB.com.
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
3D Printing News Briefs, June 6, 2026: Expansions, New 3D Printers, & More
We’re starting with business in this weekend’s 3D Printing News Briefs. Axtra3D just opened its expanded facility in Italy, and Austal USA expanded its leadership team. Then we’ll move on...
3Dnatives to Present ADDITIV Metals 2026: Resolving Key Barriers to Scaling Metal Additive Manufacturing
As the metal additive manufacturing sector prepares for a massive leap—with market valuations expected to climb from $6.02 billion to $7.02 billion this year—the industry is shifting its focus from...
3D Printing News Briefs, May 28, 2026: Continuous Fiber Reinforcement, Bioprinted Trachea, & More
In today’s 3D Printing News Briefs, America Makes announced the winners of its JAQS-SQ Project Call. Axtra3D is partnering with Keystone Industries to expand its dental material ecosystem, while BigRep...
DoW Accelerates Drone Readiness with AMTrain Phase 2 Launch at Camp Lejeune
Equipping today’s warfighter with the most advanced technology is paramount, driving increased prioritization and investment in drone development and advanced manufacturing training within the Department of War (DoW). In this...
































