

Occam’s Razor Applied to New 3D Printed UAV


The 3D printer may be nothing more than a tool, but it’s a tool which allows for the creation of complex objects that gives researchers, scientists, and artists a way to realize their vision of the future without resorting to painstakingly slow methods of construction.
It’s the speed at which such creators can design, iterate, and build out their ideas which has led to some amazing advances. Take this vehicle made by James Paulos, one of Professor Mark Yim’s students at the University of Pennsylvania Modlab, for example.
A traditional coaxial micro helicopter uses a large propeller motor, and in conjunction with two small servomotors to control thrust, pitch, and roll forces, generates the necessary forces through coordinated control of multiple actuators.
Paulos, seeking to simplify the entire mechanics of such vehicles, 3D printed a novel propeller architecture, one that allows a single motor and rotor to do the same thing a quadcopter can do, but by controlling and modulating the torque applied to one passively hinged, underactuated propeller.
 In flight tests, the two-motor coaxial helicopter demonstrated that this occam’s razor version of a UAV can provide active stability and control in a real flight system.
In flight tests, the two-motor coaxial helicopter demonstrated that this occam’s razor version of a UAV can provide active stability and control in a real flight system.
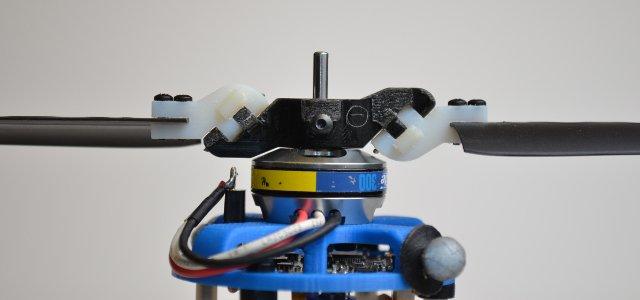
The three part propeller hub was manufactured on an Objet 3D printer from a plastic polymer, and the fixed hub interfaces with the motor shaft using a commercial aluminum mandrel and two custom plastic blade clamps which connect to the central hub along steel wire hinges.
Conventional UAVs present some serious design challenges and normally require a “swashplate” which means an increase in mass, size, and cost. With four actuators – two big rotor motors, two swashplate servo motors, and a complex linkage assembly – the normal setup is a complicated system indeed.
Paulos says this new rotor system provides “significant system simplifications” while it manages to retain all the advantages of “cyclic control” of current UAV setups.

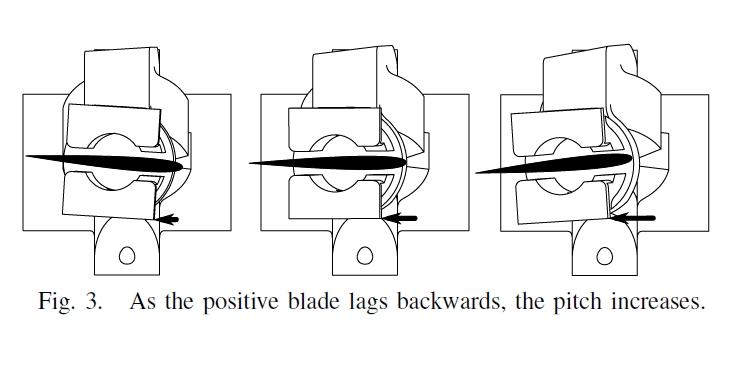
In Paulos’ system, the main motor directly drives a propeller hub which is itself connected to propeller blades by two inclined, 3D printed hinges. The hinge geometry creates what the designer calls “lead-and-lag oscillations to a change in blade pitch,” and instead of simply driving the motor with a steady torque, a sinusoidal component in phase with the rotation of the rotor can induce a “cyclic pitch variation” which determines the magnitude and direction of the vehicle.
“We can attain this motion directly from a passive dynamic response of the propeller itself,” Paulos says. “For such a propeller the mean applied torque sets the rotational speed and thrust, and an applied oscillatory torque induces the desired cyclic oscillation in blade pitch. Conceptually, this ‘positive’ rotor responds to an impulsive torque on the hub by flexing backwards and exposing increased blade pitch.”
What it means is that the design allows for new types of conventionally-capable micro air vehicles which require just two motors for practical control. Contrast that setup with conventional designs which require many servos and linkages, and the advantages become clear in their simplicity.
Do you think this new rotor and blade design for a UAV represents a workable step forward? Have you worked on UAVs which use 3D printed parts to make them function? Please weigh in with your knowledge or comments in the 3D Printed UAV forum thread on 3DPB.com.
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
Printing Money Episode 39: Q1 2026 Public Markets 3D Printing Earnings Analysis with Troy Jensen, Cantor Fitzgerald
Welcome to Printing Money Episode 39, (or, “The one where they all went to market”). It’s that quarterly time, so Troy Jensen (Managing Director, Cantor Fitzgerald) joins Danny for a review...
Goldilocks’ Flywheel: Refractory Complex Concentrated Alloys (RCCAs) & The Race for the Future
Recently, Metalysis, Skyrora, and Thermo-Calc Solutions started to try to commercialize Tanbium. This alloy has been created for use in combustion chambers and rocket nozzles. Tanbium is a Refractory Complex...
Printing Money Episode 35: Notable VC and M&A Deals, with Arno Held and Alex Kingsbury
Welcome to Printing Money Episode 35 and let us be the last to wish you a happy new year. For this episode Danny is joined by Arno Held (Managing Partner,...
Snapmaker Secures Series B Backed by Xiaomi Founder’s Network and China’s Investment Elite
Desktop 3D printer manufacturer Snapmaker has gotten a series B round. The round is led by Hillhouse Ventures and Meituan. Cowin Capital and Orient Securities Capital dipped in for another round,...































