
Korea: The 3D Printable Open-Source Anthropomorphic Robot Hand System (HRI)


Hyeonjun Park and Donghan Kim of Kyung Hee University in Korea are innovating within the robotics realm, detailing their efforts in the recently published ‘An open-source anthropomorphic robot hand system: HRI hand.’
The HRI hand system is open source and affordable, allowing users to 3D print the system for around $500. Developed with a five-finger structure, the authors created the hand with collaborative robotics in mind. This is an idea that continues to grow in manufacturing, allowing robots to partner in completing tasks with human industrial workers. End-effectors are becoming more widely used too, used for gripping and assembly ‘beyond the simple pick-and-place operation of parts.’
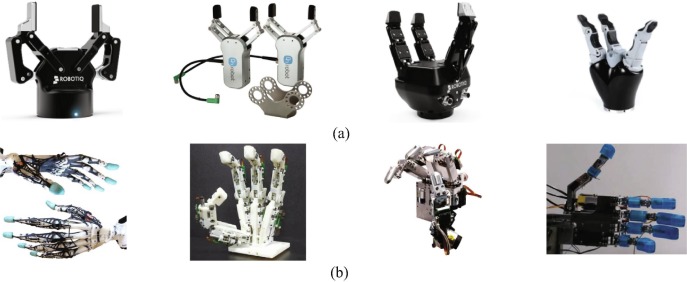
Two types of fingered end-effectors: (a) gripper type [9], [21], (b) anthropomorphic type
With more complex functions, however, comes the necessity for more complex parts and software such as actuators, a variety of mechanisms, and control algorithms that must be written.
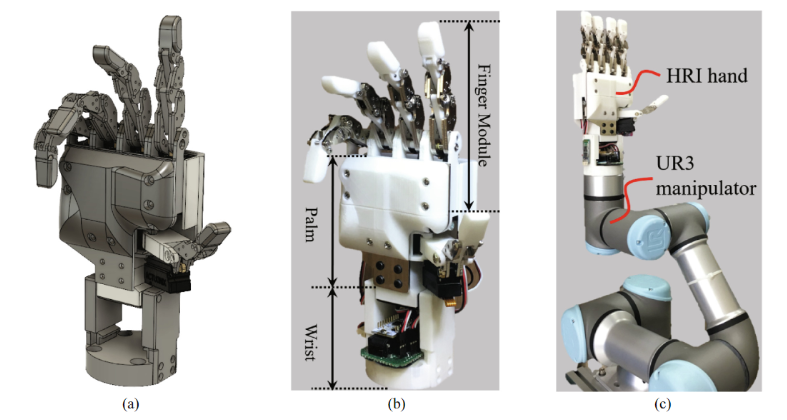
HRI hand: (a) 3D modeling, (b) proposed robot hand, and (c) HRI hand with UR3 manipulator
The anthropomorphic hand, designed after a typical male hand, has four fingers which include:
- Distal interphalangeal (DIP)
- Proximal interphalangeal (PIP)
- Metacarpophalangeal (MCP)joints
The thumb consists of:
- Interphalangeal (IP)
- Metacarpophalangeal (MCP)
- Carpometacarpal (CMC) joints
The thumb part “… operates MCP and CMC joints with two motors. The motor is controlled based on the control signal received by the micro-controller unit (MCU) via Bluetooth communication. A URDF, python node, and rviz package is also provided to support the Robot Operating System (ROS). All hardware CAD design files and software source codes have been released and can be easily assembled and modified,” explained the authors.
Finger modules include four links and three joints (MCP, PIP, and DIP joints).
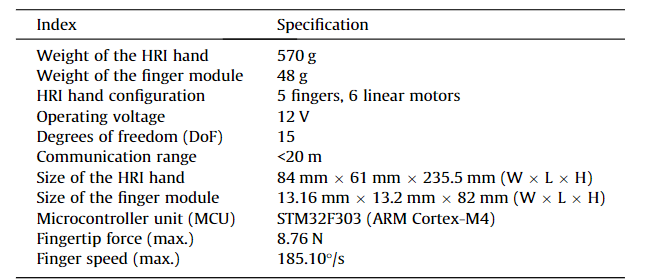
Specifications of the HRI hand
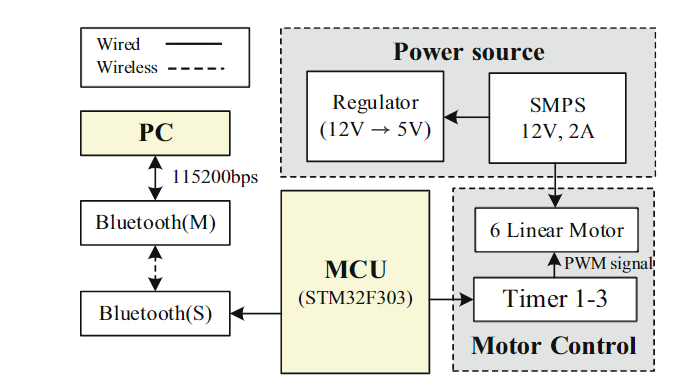
The architecture of the HRI hand system. Data protocol for controlling HRI hand.
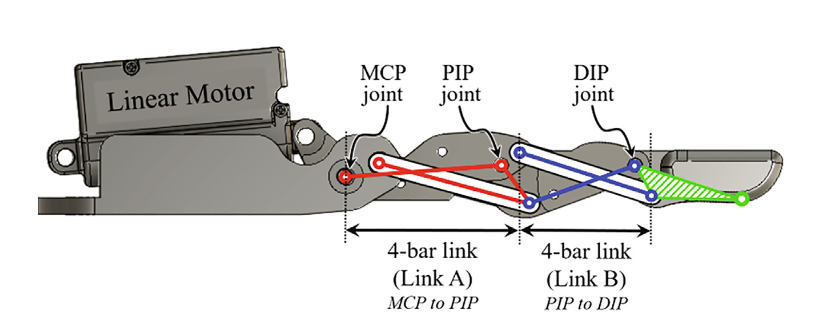
Design of the finger module.
The research paper also includes all the details for hardware files, software files, assembly, electronics configuration, operation procedures, robot operating system procedure, and more.

Assembly procedures for the HRI hand: (a) front of the finger, (b) back of the finger, (c) thumb part, (d) palm and palm cover, (e) wrist part, (f) back of the HRI hand cover and ISO 9409-1-50-4-M6 part
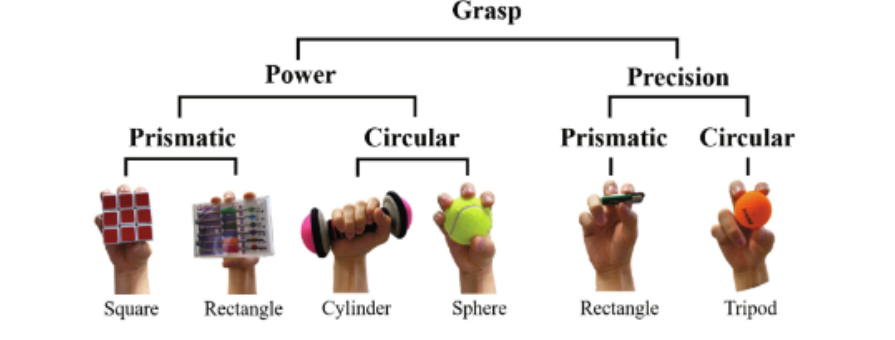
The grasp taxonomy
“The system proposed in this paper is developed with a five-finger structure, but each finger is modularized, so it can be developed with end-effectors of various shapes depending on the shape of the palm. For example, it is possible to construct various types of end-effectors depending on the researcher’s purpose, such as two-fingered grippers with two fingers or three-fingered grippers with three fingers,” concluded the authors.
“For those interested in implementing a variety of robot applications using the pro-posed system, we would strongly encourage contacting the corresponding author to discuss potential collaboration.”
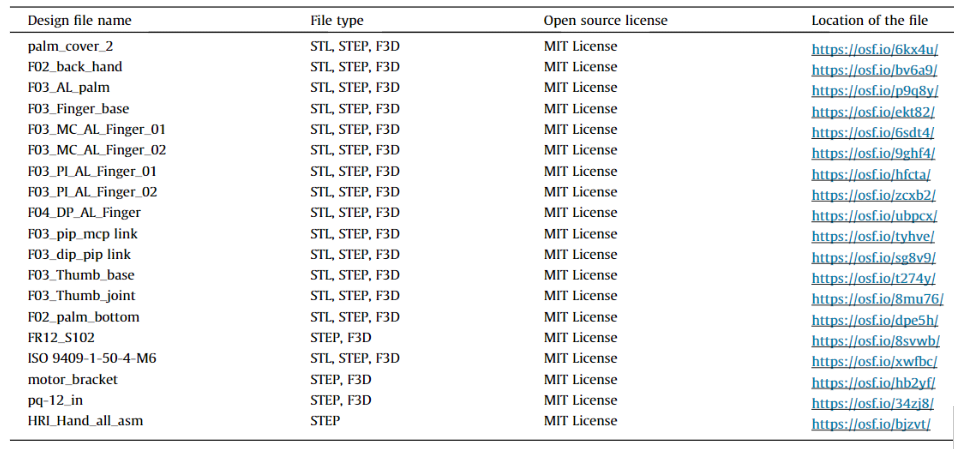
Design file summary for the HRI hand

The Bill of materials for the HRI hand system
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
How the World’s Most Advanced Tech Companies Are Using 3D Printing
3D printing has been around for decades. For most of that time, it was a prototyping tool. Engineers used it to check if a design looked right before spending money...
The New Dental Lab: “Three Technicians Can Handle a Hundred Arches,” Says Digital Dentistry Expert Josh Jakson
Josh Jakson’s path into digital dentistry started long before he had a job title. He grew up around it. His father, a Polish immigrant, started the family’s dental laboratory in...
Why Beam Control Could Redefine the Future of EB-PBF
In Part 1, Ulf Lindhe examined how advances in beam control, point melting strategies, and process monitoring are changing the way engineers think about electron beam powder bed fusion (EB-PBF)....
Additive Manufacturing at a Crossroads
Additive manufacturing is at a crossroads. Simultaneously, we find ourselves between certain very different modalities, applications, and industries. Rather than being able to explore them all, companies will now have...

































