

Testing a New Type of Functional Custom 3D Printed Prosthetic Finger



With all of the advances being made in the development of prosthetic devices, there is still a lack of affordable, customizable, functional finger prosthetics. In a paper entitled “Development of a Fully Actuated Realistic Finger Prosthesis for Proximal Phalanx Amputations,” a group of researchers describes how they developed a 3D printed finger prosthetic. They designed it as a skeletal finger that could be covered with a realistic silicone covering.
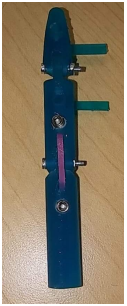 The prosthetic finger was modeled on a real pointer finger, with a diameter 10 mm smaller than the actual finger so that foams for shaping could be incorporated. For purposes of actuation, two bridges were added underneath the distal and medial segments. These function by extending underneath the adjacent finger to allow the patient to easily and naturally actuate the device. To ensure that the prosthetic returned to its resting extended state, places for elastic bands to be fixed via screw sets were made on either side of each joint.
The prosthetic finger was modeled on a real pointer finger, with a diameter 10 mm smaller than the actual finger so that foams for shaping could be incorporated. For purposes of actuation, two bridges were added underneath the distal and medial segments. These function by extending underneath the adjacent finger to allow the patient to easily and naturally actuate the device. To ensure that the prosthetic returned to its resting extended state, places for elastic bands to be fixed via screw sets were made on either side of each joint.
Three tests were then performed to evaluate the design of the skeletal prosthetic. First, a fatigue test of the PIP joint was performed, using a modified medial segment and an MTS Insight Electromechanical Testing System. Two samples were fabricated from Formlabs Tough TOTL03 resin and printed on a Form 2 3D printer, using orthodontic bands for the extension mechanism. A clamp attachment and stage adapter were used to actuate the medial segment and hold the proximal segment stationary, respectively. The test was run for up to 1,000 cycles of full flexion and full extension.
A three point bending test was also performed to test the strength of the bond of the device to a simulated residuum cap. Five samples were 3D printed on an Ultimaker 3 3D printer using PLA.
“Samples were bonded to hardened PMMA residuum caps by using uncured PMMA,” the researchers state. “Testing was performed with an MTS Sintech 10G/L with three point bending fixtures. Samples were loaded until failure.”
Finally, a qualitative test was performed by having a volunteer (who was not missing any fingers) hold the device under a finger and attempting various simple gestures and tasks, such as picking up items.
“The fatigue tests did not show significant wear of the band or joint, but did highlight an unexpected issue,” the researchers continue. “Namely, the two samples tested failed before reaching the 1000 cycles because the screw holding the joint together came loose. The three point bending test gave an average force 282.66 N to induce failure, which was well above the literature values for forces exerted by fingers. The qualitative testing indicated that the finger bridges were comfortable and easy to use. In addition, a reasonable amount of dexterity is imparted, allowing the user to grasp various sized objects in both a full hand grip and between the fingertips. However, the range of motion of the device prevents the user from gripping small objects or making a fist.”

The researchers conclude that the use of finger bridges is a potentially viable method to provide people with missing fingers with “a subtle, convenient, functionalized and aesthetically realistic prosthetic.” Further research and refinement of the design is needed, however, such as determining the life cycle of the prosthetic.
Authors of the paper include Naren Chaudhry, Karl Fetsch, Bilin Loi and John Riley.
Discuss this and other 3D printing topics at 3DPrintBoard.com or share your thoughts below.
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
3D Printing News Briefs, June 18, 2026: Reseller, Relocation, Metal Space Powder, & More
We’ll start with business news in today’s 3D Printing News Briefs, as XJet appointed a value-added reseller in Germany, BIO INX is expanding its presence in the Italian market, and...
Scientists Use BMF to 3D Print Seal Whiskers That Track Prey Long After It’s Gone
Seals use their whiskers to hunt. Not Navy Seals, although they may in some way also, but this article is about lowercase seals. Not Seal the musician either; as far...
Researchers Combine AI and Bioprinting to Create Tiny Blood Vessel Networks
If 2026 has a theme in bioprinting, it may be blood vessels. Researchers can already print incredibly sophisticated tissues. The harder part is keeping those tissues alive. Without a network...
University of Arkansas Researchers Test Metal 3D Printing in a Mars-Like Atmosphere
If humans eventually establish a long-term presence on Mars, they will face a major manufacturing challenge almost immediately. Tools will break. Parts will wear out. Equipment will need repairs. But...































