
3D Printing Used to Develop Tactile Sensor


 Tactile sensors are used in the development of robotics, computers and security systems. They are often used in touchscreens, as well as to mimic the human sense of touch for robots. In a paper entitled “Design and Development of a Conductive Polymer Based 3D-Printed Tactile Sensor with Square Type Spring Structure,” a group of researchers describe their creation of a tactile sensor using 3D printing.
Tactile sensors are used in the development of robotics, computers and security systems. They are often used in touchscreens, as well as to mimic the human sense of touch for robots. In a paper entitled “Design and Development of a Conductive Polymer Based 3D-Printed Tactile Sensor with Square Type Spring Structure,” a group of researchers describe their creation of a tactile sensor using 3D printing.
Conductive polymer-based piezoresistive tactile sensors enable a flexible quality which is present in human skin; however, according to the researchers, most of these tactile senors are unable to identify more than two parameters simultaneously. In the study, the researchers designed, developed and tested a tactile sensor with the dimensions of 50 x 50 × 56 mm based on a 2×2 conductive polymer based sensing element array incorporated to a square type spring structure. This spring structure was produced using 3D printing.
The sensing element was developed to be highly customizable. The sensor’s base material is silicone rubber which has enhancements by silica and carbon black, with Silane as the coupling agent.
“The spring structure stated in this paper has been designed for force scaling purpose and numerically analyzed using COMSOL Multiphysics prior to the fabrication,” the researchers state. “Circuitry for embedded electrodes was also developed in this research with a wireless communication between the sensor assembly and the developed user interface which allows to use the sensor as a plug and play device.”
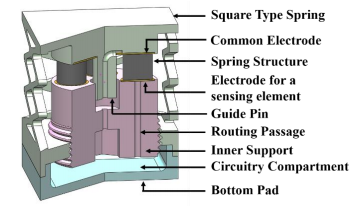
With force sensors, it is necessary to define a working range. Controlling the working range can be done by overseeing the deflection applied to the sensing element. By introducing an external square type spring structure to sensing elements, the working range can be easily altered. The spring structure is designed to facilitate a 2 x 2 array of sensing elements and designed for three separate parts.
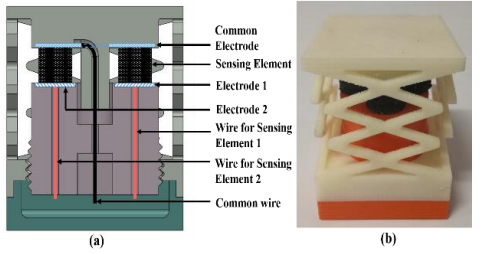
A two-layered saw tooth shape was developed in a single square type spring, which was 3D printed using ABS Plus. The fabrication of the sensor itself was carried out in two stages: the fabrication of the sensing element and then the sensing structure. The sensing element was made mostly from Room Temperature Vulcanization (RTV) Silicone Rubber. A mechanical molding method was used to create the sensing element, with the mold designed in three layers to make the sensing element easier to remove.
“The mould is capable of developing sensing elements with different geometries and with different thickness ranges in one batch of production,” the researchers explain. “A key feature of this production process is sensing elements can be developed according to the required geometry and size with different performance levels.”
Three parts in total were 3D printed; the square type spring structure was printed in ABS with 100% infill while the other two parts – the bottom pad and the inner support – were printed with PLA with 75% infill. The sensing element was then tested using a static load test.

“This square type spring structure minimized deflection of the sensing element while it allows the expansion to the operation range,” the researchers conclude. “This sensor designed to overcome the inherent issues in conductive polymer based sensing elements using an internal signal conditioning circuitry.”
Discuss this and other 3D printing topics at 3DPrintBoard.com or share your thoughts below.
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
Australia’s AMCRC Funds Titanium 3D Printing R&D
In terms of the global economy’s presently existing state, there is no realistic path to economic resilience that doesn’t start with critical minerals security. This is a problem for pretty...
3DPOD 305: Automating AM with Grenzebach’s Oliver Elbert
Oliver Elbert‘s over ten years in additive manufacturing have been spent automating LPBF. For large, high-volume, or critical parts, Grenzebach has provided custom automation solutions. Depowdering, powder handling, sieving, heat...
AMPulse Asia: Chinese IPOs, Defense Deals, and Dental 3D Printing Lead APAC Roundup
The second half of June brought a wave of additive manufacturing activity across China, Japan, South Korea, India, and Australia. From Chinese IPOs and funding rounds to defense, aerospace, construction,...
Austal, Curtin University and AMCRC Work on R&D Together
Australia’s Additive Manufacturing Cooperative Research Centre (AMCRC) works with 70 industry partners to deliver collaborative R&D projects. They also work on workforce development and technology transfer. It’s kind of analogous...































