3D Printed “Tact” Prosthetic Hand Takes Functionality to a New Level

 The 3D printing and maker community has demonstrated over and over again just how capable it is of making the world a better place and improving the quality of life of its inhabitants in a seemingly infinite number of ways. We’ve seen the spirit of entrepreneurship combine with philanthropy in the field of prosthetic devices as 3D printers and DIYers join forces to make life much easier for people with missing limbs. In particular, the surge of innovation with respect to prosthetic hands has been impressive and a new contribution to the effort has just been introduced by one Instructables contributor, Patrick Slade, who previously created impressive, functional, customized 3D printed rollerblades.
The 3D printing and maker community has demonstrated over and over again just how capable it is of making the world a better place and improving the quality of life of its inhabitants in a seemingly infinite number of ways. We’ve seen the spirit of entrepreneurship combine with philanthropy in the field of prosthetic devices as 3D printers and DIYers join forces to make life much easier for people with missing limbs. In particular, the surge of innovation with respect to prosthetic hands has been impressive and a new contribution to the effort has just been introduced by one Instructables contributor, Patrick Slade, who previously created impressive, functional, customized 3D printed rollerblades.
Patrick, a student at the University of Illinois Urbana-Champaign, lists as some major interests “robotics, 3D printing, green designs, fun.” A repeat contributor to Instructables, Patrick has now shared instructions for making what he’s called “Tact,” an inexpensive, open-source, 3D printed prosthetic hand. The project is credited to Slade along with Aadeel Akhtar, Mary Nguyen, and Timothy Bretl, all of UI.
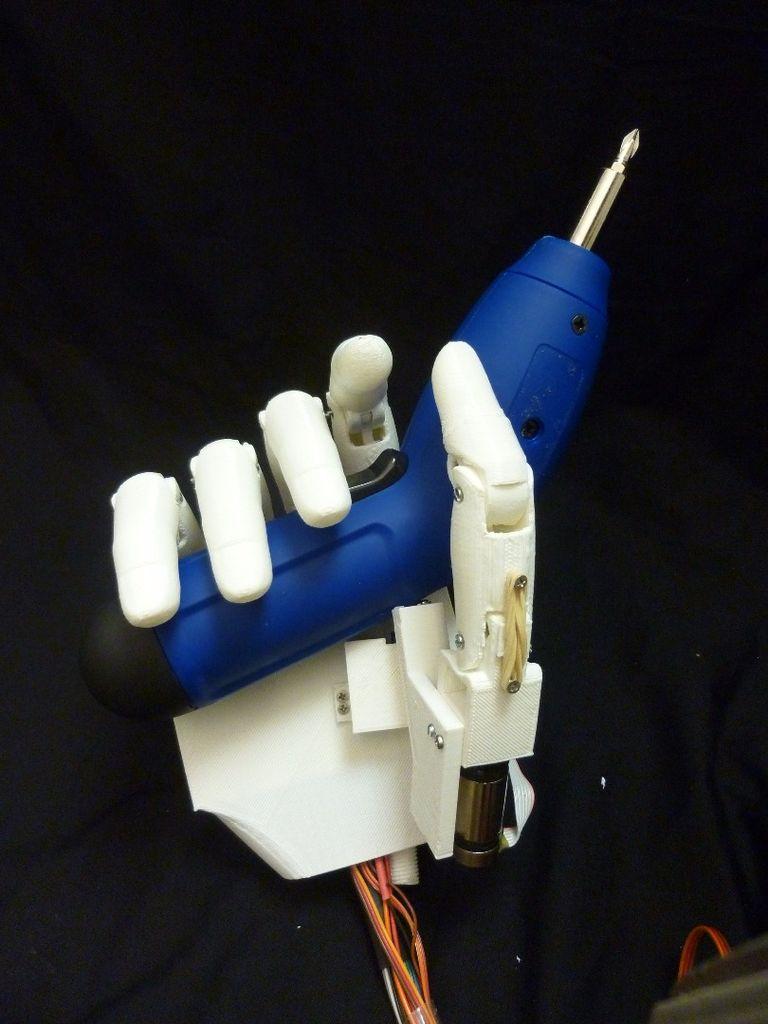
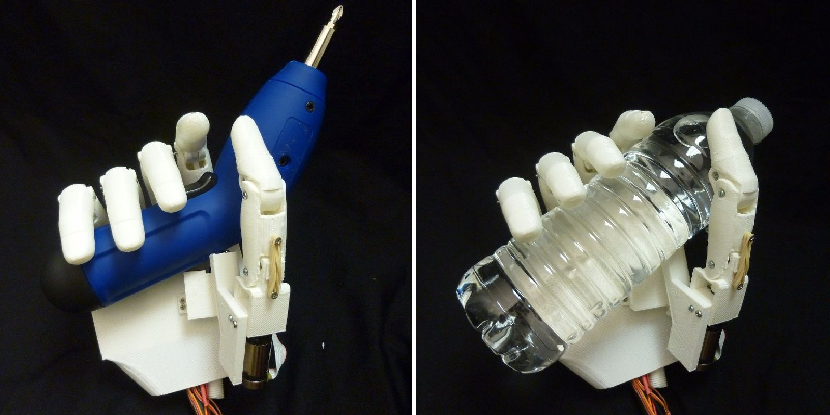
Further, he has improved on other similar prosthetic devices in a number of ways. The Tact can be assembled using only one hand and a clamp, a characteristic that we find both brilliant and pragmatic. It costs about $100 to produce, around $250 if you want to add the myoelectric (muscle) control, which allows the Tact to perform a number of important grasps including fine pinching, power gripping, and what Patrick refers to as the “three-jaw chuck.”

Patrick’s Tact prosthetic hand rivals in functionality similar commercial devices that cost as much as $30,000 to $40,000. His Instructables page includes a chart with which he contrasts the Tact with top-ranked (and priced) prosthetic hands of comparable quality to his open-source device. A second chart compares the Tact to other, similar open-source prosthetic hands and finds it capable of applying 2.5 times the force of the others despite weighing 20% less.
One component of the Tact that makes it so effective is what Patrick calls “the four-bar linkage” in a finger of the device.
“This linkage ensures that the two joints of the finger close proportionally and [reliably] each time the hand is operated, providing consistent performance,” he explains. “Most open-source designs…only use a tendon strung through the finger to winch it closed.”
Less sophisticated mechanics like this result in less reliability and competence, which Patrick is striving to avoid with the Tact, providing users with a prosthetic device about which they can feel completely confident.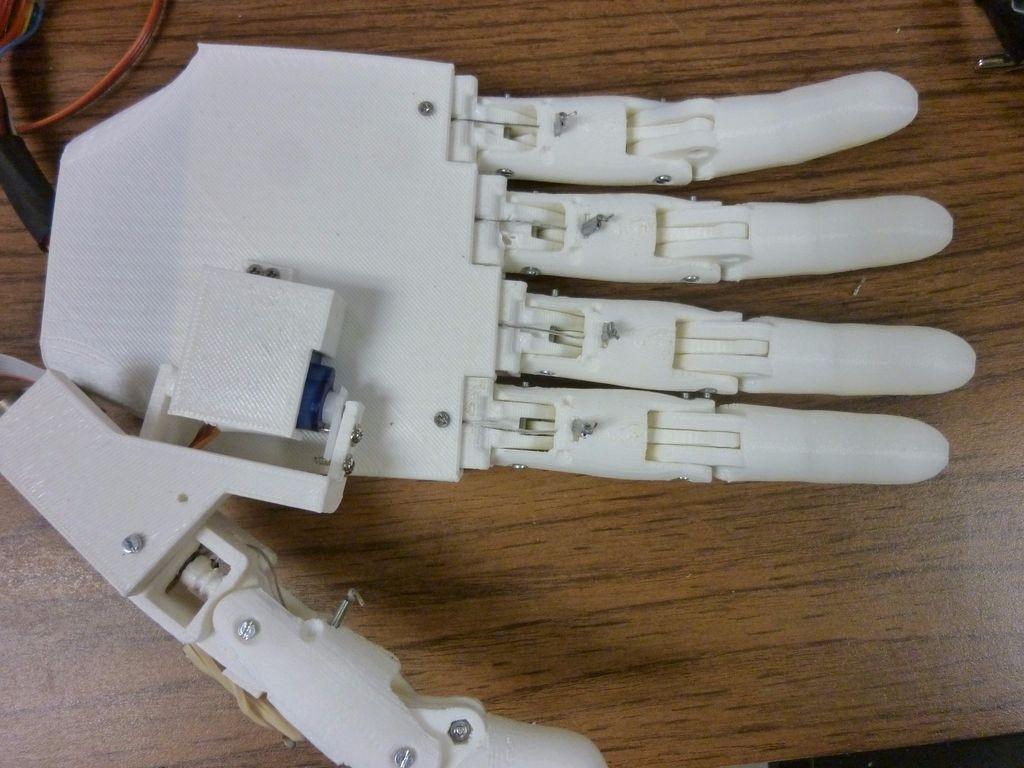
If you plan to make a Tact prosthetic hand, you will be using common, off-the-shelf components and 3D printing, which is why the overall cost is easier to control. For a list of parts, see Patrick’s Instructables page. He encourages you to make substitutions with items you already have available when appropriate.
 You’ll need a few tools–a screwdriver, two needle-nose pliers, and some wire cutters. You’ll also need a 3D printer, of course. Patrick used his MakerBot Replicator 2X, but notes that most any home 3D printer is capable of printing the parts required for the Tact. You can also upload the .stl files, available on Patrick’s Github page, to your 3D printer or a web-based 3D printing service. It took about 14 hours to 3D print the parts for the Tact and most were printed at 0.2mm resolution and 10% infill (with the exception of the spool).
You’ll need a few tools–a screwdriver, two needle-nose pliers, and some wire cutters. You’ll also need a 3D printer, of course. Patrick used his MakerBot Replicator 2X, but notes that most any home 3D printer is capable of printing the parts required for the Tact. You can also upload the .stl files, available on Patrick’s Github page, to your 3D printer or a web-based 3D printing service. It took about 14 hours to 3D print the parts for the Tact and most were printed at 0.2mm resolution and 10% infill (with the exception of the spool).
Patrick explained the way that the more complex, robotic prosthetic hands function and noted that he would be working on a future Instructable that uses myoelectric control via “a complex, eight-channel EMB (electromyography) chip and the use of a machine learning algorithm called ‘linear discriminant analysis.”
Let us know what you think about this impressive hand creation in the 3D Printed Tact Hand forum thread at 3DPB.com. Check out a video below of the hand in action.
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
Bambu Launches A2L: What the New Printer Reveals About Its Strategy
Bambu Lab continues its relentless march for 3D printing domination with the launch of the A2L. The 330 × 320 × 325 mm printer will have a nozzle temperature of...
3D Printing News Briefs, May 30, 2026: RIMPAC 2026, Acquisition, Ceramic Implants, & More
We’re kicking things off with materials news in this weekend’s 3D Printing News Briefs. Then it’s on to a hybrid manufacturing system for a maritime exercise, an expansion of industrial...
3D Printing News Briefs, May 28, 2026: Continuous Fiber Reinforcement, Bioprinted Trachea, & More
In today’s 3D Printing News Briefs, America Makes announced the winners of its JAQS-SQ Project Call. Axtra3D is partnering with Keystone Industries to expand its dental material ecosystem, while BigRep...
Peopoly Unveils $15,000 Giga 800 FGF 3D Printer for Large Pellet Prints
Peopoly is known for its Magneto X, a printer that eschews belts and uses linear motors instead. The company also has a vat polymerization system, and now is moving into FGF...