Is the Triple Delta Robot a 3D Printing Gamebreaker?

Back in the early 1980s, the brilliant Reymond Clavel invented the delta robot.
Clavel, the director of the Laboratoire de Systèmes Robotiques 2 at the École Polytechnique Fédérale de Lausanne in Switzerland, is one of the pioneers in the development of parallel robots and the inventor of the delta robot. His work has resulted in 25 patents and the formation of no fewer than six startup companies.
There have been a whole genre of delta 3D printers created since then (some of them capable of creating enormous parts), but one inventor has outlined a new vision for how delta 3D printers might work.
 When Aad van der Geest saw Clavel’s delta robots for the first time, he was hooked on the efficacy of the idea. It just so happens that van der Geest is an independent developer of software and electromechanical products, and he’s invented systems from special calculators to a full color 3D printer.
When Aad van der Geest saw Clavel’s delta robots for the first time, he was hooked on the efficacy of the idea. It just so happens that van der Geest is an independent developer of software and electromechanical products, and he’s invented systems from special calculators to a full color 3D printer.
Reymond Clavel, inventor of the delta robot
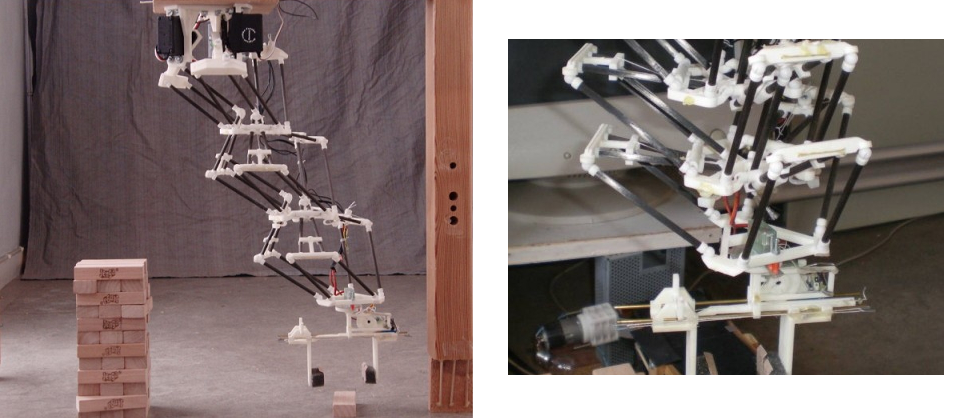
As van der Geest got deeper into his examination of the technology, he found what he saw as a major disadvantage with the delta design; the robots can only operate within a relatively small volume, and so the idea for a double or triple delta device came about.
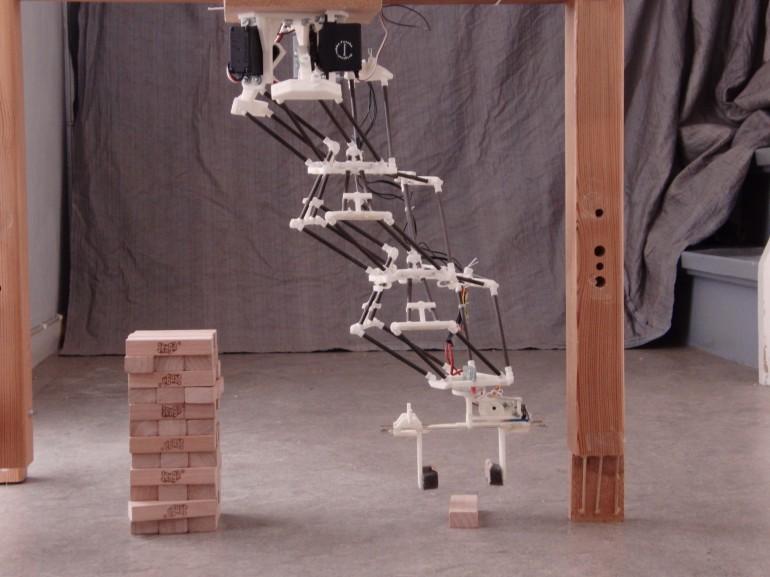
It’s a linkage of multiple delta robot segments. At the core, his idea is simple and elegant: it involves linking multiple delta arms together while leaving heavy control mechanisms and actuators attached to the base.
 As all the actuation is all done from the base and linkages are all controlled from a single point, it’s possible for the arms of van der Geest’s design to be constructed of lightweight – or even featherweight – composite materials. It means the parts of his delta robot which are in motion suffer from very little inertia. It’s that lack of interia which lets the arms of the triple delta robot move at lighting speed and accelerate quickly from rest.
As all the actuation is all done from the base and linkages are all controlled from a single point, it’s possible for the arms of van der Geest’s design to be constructed of lightweight – or even featherweight – composite materials. It means the parts of his delta robot which are in motion suffer from very little inertia. It’s that lack of interia which lets the arms of the triple delta robot move at lighting speed and accelerate quickly from rest.
Because all the arms in the devices are connected to the end-effector, the result is a very stiff overall construction that doesn’t compromise weight and reduce work volume.
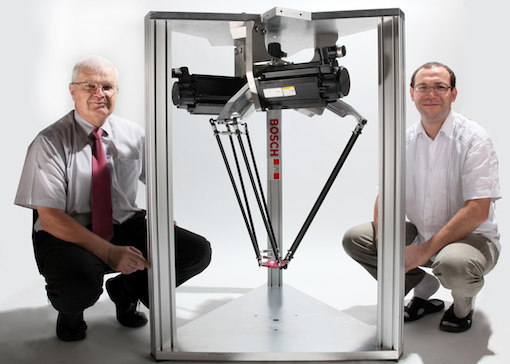
The inventor’s three working prototypes – one just 150 mm (6 in) long and the largest measuring more than 11 ft tall – use rotary actuators.
 As part of some recent experiments with vertical linear actuators in a linear delta design, van der Geest says he’s also created a unique style of 3D printer which will, at least theoretically, be capable of large-volume build areas – and all for the sort of price you’d expect to pay for a “conventional” 3D printer.
As part of some recent experiments with vertical linear actuators in a linear delta design, van der Geest says he’s also created a unique style of 3D printer which will, at least theoretically, be capable of large-volume build areas – and all for the sort of price you’d expect to pay for a “conventional” 3D printer.
While van der Geest isn’t ready to announce the completion of any commercial deals for the idea, he does have lots of material which demonstrate how the systems work and their potential. Do you think a double or triple delta 3D printer based on Aad van der Geest’s design could work to make enormous parts? Let us know what you think on the Triple Delta Robot a 3D Printing Gamebreaker forum thread on 3DPB.com.
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.









You May Also Like
China Becomes Latest Space Power to Demonstrate Metal 3D Printing in Orbit
China has demonstrated metal 3D printing in space as part of its plan to develop manufacturing technologies for future space missions, including Moon construction. The experiment took place aboard the Qingzhou...
AMPulse Asia: APAC 3D Printing Market Roundup
Key Takeaways Coverage window: April 27 to May 10, 2026. Roughly 30 additive manufacturing (AM)-relevant announcements were tracked across eight Asia-Pacific countries. Largest disclosures: Farsoon Technologies (688433.SH) filing a RMB...
3D Printing Financials: Stratasys Bets on Defense and Drones as Printer Sales Slow
Stratasys (Nasdaq: SSYS) started 2026 with lower revenue and a larger loss as customers continued to slow down spending on new 3D printers. Still, the company pointed to stable recurring...
3D Printing Financials: Xometry Surges After Record Quarter and Siemens Deal
Shares of Xometry (Nasdaq: XMTR) surged on Thursday, May 7, after the company reported record first-quarter 2026 results and announced a major partnership with Siemens. The stock climbed as much...