3D Printing Used to Create Optimized Surgical Snake Robot

 Intraluminal surgical procedures are those that take place within the walls of an organ, particularly tubular ones. In a paper entitled “Rolling-Joint Design Optimization for Tendon Driven Snake-like Surgical Robots,” a group of researchers discuss how they used 3D printing to optimize the design of a snake-like robot for use in intraluminal surgeries.
Intraluminal surgical procedures are those that take place within the walls of an organ, particularly tubular ones. In a paper entitled “Rolling-Joint Design Optimization for Tendon Driven Snake-like Surgical Robots,” a group of researchers discuss how they used 3D printing to optimize the design of a snake-like robot for use in intraluminal surgeries.
Snake-like robots have several advantages in surgical procedures. They have a long, narrow shape that allows them to reach confined spaces and deep wounds, and they have flexible bodies that can follow natural pathways within the human body. They also require fewer incisions, or even no incisions at all. Surgical snake robots should have several important features, according to the researchers. They should have a narrow body that can navigate through small incisions or natural orifices, and they should have “locomotion that is amenable to local anatomical constraints, e.g., path following and navigate within a prescribed working volume.”
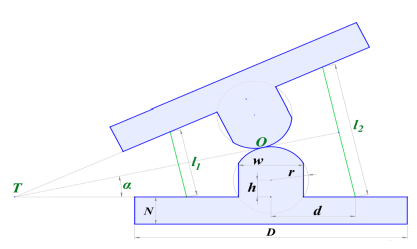
Cross-section of a rolling joint
These robots should also be equipped with high fidelity vision or stereovision as well as lighting. They should have multiple internal channels and have interchangeable tools for grasping, cauterization, etc. They should have sufficient force for tissue manipulation and features such as a suction irrigation channel and integrated sensing and imaging. Ideally, they should also be patient specific for a custom fit to uncommon anatomies.
In the paper, the researchers describe how they designed a novel multi-tool snake-like robot, called the i2 Snake (Intuitive Imaging Sensing Navigated and Kinematically Enhanced robot) for minimally invasive surgery. They went with a tendon-driven architecture with serial links in order to make sure that the device could include space for multiple tools as well as “forces sufficiently high to manipulate bulk tissue.” Specifically, they used a rolling-joint design, a bio-inspired mechanism that consists of two circular surfaces rolling against each other. This type of joint can be found in many species, including humans, in parts like the knee and phalanges.
Standard rolling joints have a drawback: they can slip, resulting in control inaccuracies or a dislocated joint. There are three different kinds of slipping that can occur: a lateral slip, where the top rolling part rolls too far and slips off the bottom part; a longitudinal slip, which occurs when external side forces are exerted; and a rolling slip, where the two surfaces skid against each other.
“To overcome these limitations, a new bi-stable synchronous rolling-joint design is proposed,” the researchers state. “The solution consists of using a spur gear sandwiched between two rolling surfaces combined with four tendons. The spur gear can overcome both the longitudinal-slip and the rolling-slip while the four tendons, in addition to the gear, can prevent the lateral slip.”
The researchers used an Mlab 3D printer from Concept Laser to manufacture a prototype of the optimized rolling joint. The joint was then characterized in terms of precision and manipulation forces.

“The results show manipulation forces up to 5.6 N but will need to be further characterized in a clinical scenario with an outer sheath and tools running inside the robot,” the researchers conclude. “Future work will investigate non-linear control for backlash and elongation compensation in the context of autonomous navigation. Flexible and exchangeable surgical tools will be integrated and tested during ex-vivo and ultimately in-vivo surgical tasks.”
In addition to the rolling joint, the design of the robot also consisted of “a corresponding optimization algorithm that also considers collisions, and a spinal cord architecture with tendon routed in the center of the robot to reduce tendon cross-talk.”

Authors of the paper include Pierre Berthet-Rayne, Konrad Leibrandt, Kiyoung Kim, Carlo A. Seneci, Jianzhong Shang and Guang-Zhong Yang.
Discuss this and other 3D printing topics at 3DPrintBoard.com or share your thoughts below.
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
You May Also Like
Precision at the Microscale: UK Researchers Advance Medical Devices with BMF’s 3D Printing Tech
University of Nottingham researchers are using Boston Micro Fabrication‘s (BMF) 3D printing technology to develop medical devices that improve compatibility with human tissue. Funded by a UK grant, this project...
3D Printing Webinar and Event Roundup: April 21, 2024
It’s another busy week of webinars and events, starting with Hannover Messe in Germany and continuing with Metalcasting Congress, Chinaplas, TechBlick’s Innovation Festival, and more. Stratasys continues its advanced training...
3D Printing Webinar and Event Roundup: March 17, 2024
It’s another busy week of webinars and events, including SALMED 2024 and AM Forum in Berlin. Stratasys continues its in-person training and is offering two webinars, ASTM is holding a...
3D Printed Micro Antenna is 15% Smaller and 6X Lighter
Horizon Microtechnologies has achieved success in creating a high-frequency D-Band horn antenna through micro 3D printing. However, this achievement did not rely solely on 3D printing; it involved a combination...