Nu Hand – A 3D Printed Anatomically Correct Prosthetic Hand Hits Kickstarter

 One of the most interesting uses for 3D printing technology over the past couple of years has been that of creating prosthetic hands. There are literally hundreds or perhaps even thousands of individuals who are already benefiting from 3D printed prostheses. Groups like e-NABLE have played a huge role in the design, printing, and sharing of techniques for creating one-of-a-kind prosthetic hands, sized exactly to individual users. We are only in the early stages though, as far as how advanced this technology can become. 3D printing has provided a means for creating affordable, functional, custom prostheses, but it is the individual designers and engineers who will ultimately take the technology further.
One of the most interesting uses for 3D printing technology over the past couple of years has been that of creating prosthetic hands. There are literally hundreds or perhaps even thousands of individuals who are already benefiting from 3D printed prostheses. Groups like e-NABLE have played a huge role in the design, printing, and sharing of techniques for creating one-of-a-kind prosthetic hands, sized exactly to individual users. We are only in the early stages though, as far as how advanced this technology can become. 3D printing has provided a means for creating affordable, functional, custom prostheses, but it is the individual designers and engineers who will ultimately take the technology further.
 This is what led a man named Tim Chung to begin contemplating ideas on creating a “better 3D printed prosthetic hand”. What he has come up with is a device that he calls “Nu Hand”.
This is what led a man named Tim Chung to begin contemplating ideas on creating a “better 3D printed prosthetic hand”. What he has come up with is a device that he calls “Nu Hand”.
“This project is a culmination of my desire to use my engineering skills and biomedical education to benefit the world at large,” Chung explains. “I have known amputees personally, which has given me a glimpse into the challenges they face. I conceived of the Nu Hand as a way to make an immediate impact for the millions of people in the growing amputee community (a population expected to nearly double by 2050 in the U.S. alone due to longer life spans, vascular diseases such as diabetes, etc). In pursuit of this vision, I founded the Biomechanical Robotics Group around a team of individuals that share this same mindset of innovation in the emergent market of 3D printed prostheses.”
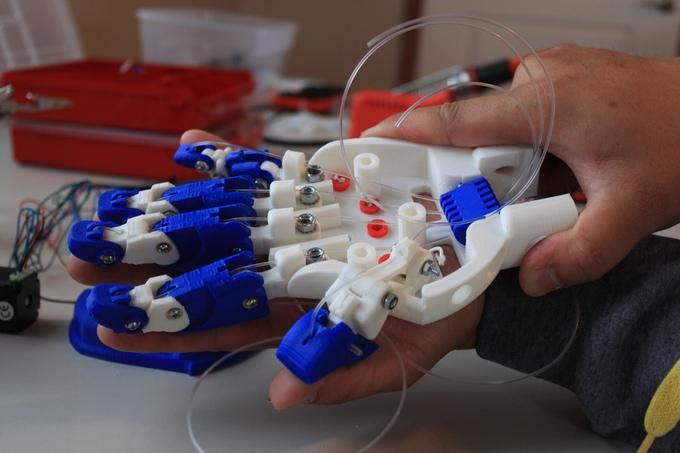
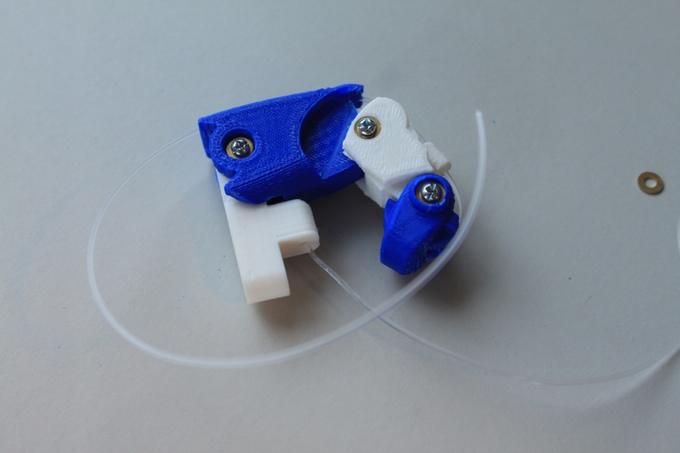
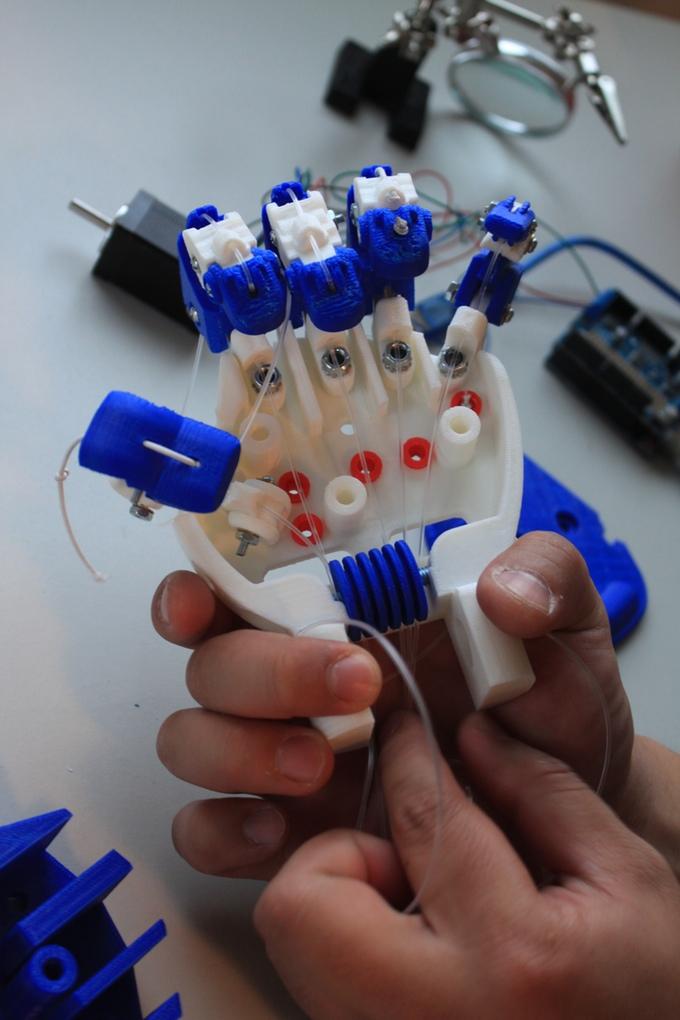
The Nu Hand isn’t like your typical 3D printed prosthesis. It provides for movements which are more natural, in relation to the real human hand. It allows for lateral movement of each finger (side to side), using servo motors, and like other prosthetic hand designs, uses individual wires to mimic real human tendons. Each finger will be able to be controlled individually using just a single motor. This will reduce the drain on batteries, and provide for a lighter, more affordable prosthesis. Elastic bands are used on the backside of the hand to return the fingers to their natural position, once the tendons cease to pull.
 At the same time, the Nu Hand will be sized in proportions to the wearer’s actual hand size. Fingers will virtually match up with the wearer’s fingers on their other hand, and proportions will be kept the same. For individuals who may not be able to, for one reason or another, provide designers with accurate hand size data, anthropometry will be used. Anthropometry is a field of study that measures proportions of the human body, in order to come up with the ideal size for other parts of the body.
At the same time, the Nu Hand will be sized in proportions to the wearer’s actual hand size. Fingers will virtually match up with the wearer’s fingers on their other hand, and proportions will be kept the same. For individuals who may not be able to, for one reason or another, provide designers with accurate hand size data, anthropometry will be used. Anthropometry is a field of study that measures proportions of the human body, in order to come up with the ideal size for other parts of the body.
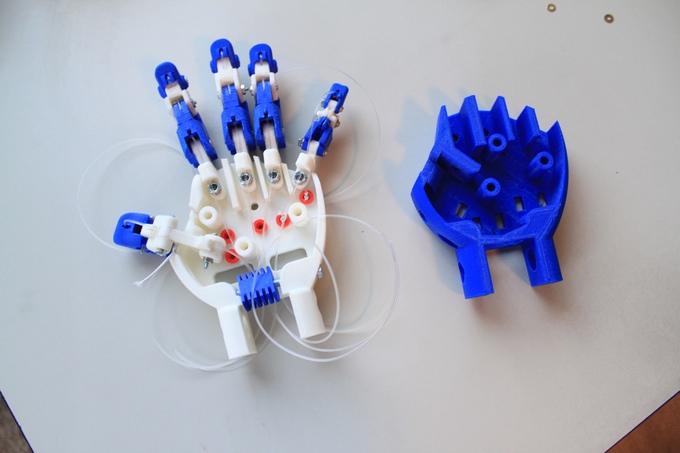
The Nu Hand is also designed to be extremely modular, meaning if a part breaks, the user can access a basic set of tools to easily 3D print a new one. This means that there will be limited downtime, which is another great benefit when compared to more traditional prostheses.
Muscle sensors will be used to control the hand, meaning that as long as the user has enough strength in his/her arm muscles, they will be able to control the movements in a similar fashion to how they do so with their other “working” hand. Muscle sensors will provide signals to a micro-controller, which can then tell the servo-motor exactly which finger(s) to move, and in which direction(s) to move them. For individuals lacking enough muscle control, the developers of the Nu Hand plan to explore alternative control methods.
Currently Nu Hand is looking to raise $50,000 on Kickstarter in order to complete the current prototype and take the next steps to bring the hand to market. If all goes as planned, and the Nu Hand is fully funded, the final version is expected to be finished and ready for shipment in November of 2015.
What do you think about this unique project? Have you helped fund the campaign? Discuss in the Nu Hand forum thread on 3DPB.com. Check out the video below.
Podcast: Play in new window | Download
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.









You May Also Like
Astrobotic Tests Rocket Engine Made with Elementum 3D Materials
Astrobotic has completed a series of hot-fire tests for its Chakram rotating detonation rocket engine, with additive manufacturing (AM) playing an important role in how the engine was built. The...
ARC & ORNL Form Partnership to Accelerate AI-Enabled Manufacturing for Defense
Last year, Autonomous Resource Corporation (ARC) became the surprising owner of Desktop Metal’s (DM’s) assets following the bankruptcy of the one-time additive manufacturing (AM) unicorn, an acquisition that cost ARC...
HP Stock Jumps on 3D Printing Buzz
HP (NYSE: HPQ) had its best day in over a year this week, with shares jumping more than 7% on Tuesday. Interestingly, the move was quickly tied to 3D printing,...
HP’s MJF 1200 Targets Entry-Level AM — And Could Shift the Competitive Landscape
HP has launched an entry-level MJF solution, the HP Multi Jet Fusion 1200 3D Printer Solution, which will be available in 2027. What is the 1200 exactly? What does it...