

Open Source Robotic Indoor Airship with 3D Printed Frame


3D printing is often used in the fabrication of airplane and spacecraft components, but many also turn to the technology to make smaller flying systems, like drones, RC and model airplanes, and airships. Gal Gorjup and Minas Liarokapis, members of IEEE with the University of Auckland Department of Mechanical Engineering‘s New Dexterity research group, published “A Low-Cost, Open-Source, Robotic Airship for Education and Research” about their work developing and evaluating a miniature indoor robotic airship platform, featuring a 3D printed frame.
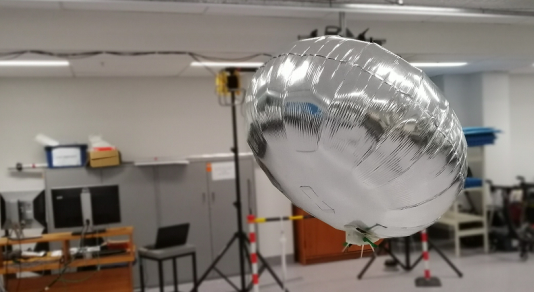
Proposed low-cost, open-source, indoor robotic airship, consisting of a gondola with all electronics, rotors, and a Qualatex Microfoil balloon (metallised PET).
Airships, a type of lighter-than-air (LTA) craft, can navigate through the air under their own power, and have a less obstructed field of view, no locomotion issues over obstacles, and can maintain a specific altitude for much longer than most UAVs. They have a soft envelope and fly slowly, so precise collision control is not necessary for indoor flying, and are safer due to a lack of sharp, high-velocity rotor blades.
“These attributes render LTA platforms an interesting solution for various robotics education and research applications. Even though their physical interaction capabilities are limited, their higher mobility and lower cost makes them a viable alternative to static or ground-based robots in many applications involving tele-embodiment, monitoring, guidance, and entertainment,” the pair wrote.
However, there are some design and control challenges to get past with airships, such as controlling them during a disturbance like air conditioning, and finding the right lifting gas. Helium is typically used, as it has high lift capabilities and nonreactive properties, but it’s nonrenewable, which means that the proper envelope material is “critical” in terms of environmental and financial prospects.
The researchers chose helium over hydrogen, hot air, and other lifting gases, for its safety and “high lifting capacity.” In order to keep costs low, they considered several candidates for the envelope material, looking at mechanical properties and helium retention capabilities.

L-R: Qualatex untreated 16″ latex balloon, Qualatex untreated 24″ latex balloon, Qualatex 24″ latex balloon treated with Ultra Hi-Float (UHF), Qualatex 24″ clear Bubble balloon, and Qualatex 36″ Microfoil balloon.
“To evaluate their helium permeability, the balloons’ lifting capacities, along with their surfaces, were measured daily over the course of 16 days. Because of their elastic properties, the surfaces of latex and Bubble balloons were determined through their circumferences. The Microfoil balloon surface was measured before inflation as the material does not stretch,” they wrote.
“The obtained helium escape rates were then averaged and used in a feasibility study projecting expected helium losses through the membrane of an ideal spherical balloon.
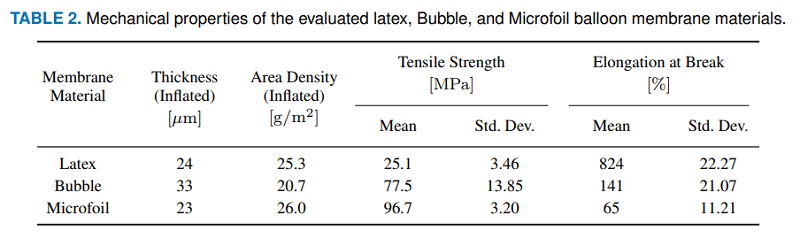
The researchers also examined how thick the membrane of the materials were when the balloon was inflated, in addition to “membrane area density in the inflated state, membrane tensile strength, and membrane elongation characteristics,” though again, the Microfoil balloon was measured in its uninflated state. Balloon area density was calculated, and they determined the materials’ tensile strength and elongation figures.
“The strain rate was 50 mm/min for Microfoil, and 500 mm/min for latex and Bubble samples,” they stated.

Assembled gondola of robotic airship. Electronics are inside the gondola body and three rotors are used. The gondola is attached to the balloon with Velcro.
They built the gondola for their airship around their actuators and electronic components, including a “Raspberry Pi Zero W running a Lite version of the Raspbian Stretch,” motor drivers and DC motors, a step-up voltage regulator, three propeller units, and a camera module. Excluding the 3D printer filament and wiring, the cost for all these components came to just $90.
The modular gondola frame was 3D printed, with detachable legs and rotor brackets, and Velcro was used to attach the gondola to the envelope. The researchers investigated two gondola placement options, and four side rotor angles, in order to optimize the airship’s flight stability.

Exploded view of robotic gondola. The electronics are at the top, and the camera is positioned in an angled configuration at the left. Modular rotor brackets and airship legs allow for easy replacement and fast modification.
“The first placement was centered and symmetric with respect to the envelope, in which case the side rotors were horizontal and a third one would in principle be required to control the airship altitude,” the pair wrote. “The second option angled the gondola with respect to the envelope centre, tilting the airship and shifting its side rotors out of the horizontal plane.”
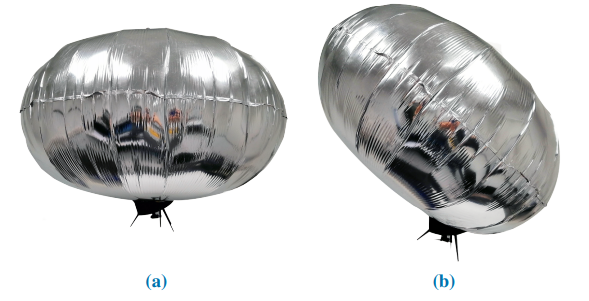
Centered (a) and angled (b) gondola positioning in flight stability experiments.
Using the asymmetrical gondola placement, they completed ten indoor trials each for side rotor angles of 0°, 5°, 10°, and 20°, with “gondola placement at 25% and 50% of the rotor maximum speed.” A variation of a carrot-chasing algorithm was used to set the flight path, though it was modified with a controller that adjusted baseline rotor speeds, as the two side rotors affected the speed, heading, and altitude of the airship.
“The efficiency of the final design is experimentally validated via a proof-of-concept path following exercise that proves its manoeuvring capabilities, while the airship’s motion is being tracked by a Vicon motion capture system,” the researchers explained.

Side rotor angle configurations, with respect to gondola axis of symmetry.
“The proposed airship relies on two rotors for both altitude and heading control for simplicity reasons. This choice imposes certain instability to the platform,” the team explained. “Multiple basic control methods that are typically used in undergraduate Engineering courses were examined and a basic proportional control provided the best results in terms of path tracking efficiency and simplicity.
“Position and orientation of the airship during path following was recorded and examined.”

Measurements focusing on balloon lift over time. The untreated latex balloons experienced a rapid decrease in the available lift, while the Bubble and Microfoil provided the best results.
The untreated latex balloons quickly lost their lifting abilities, “while others were deflating linearly at a much slower rate.”
“A more direct material comparison was possible through determining the helium flux through the balloon membranes,” the pair wrote.
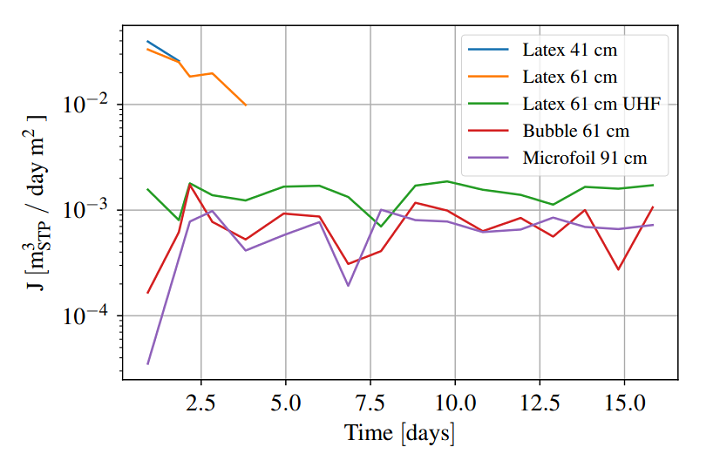
Daily helium flux through the balloon membranes. The untreated latex balloons deflated after 2 and 4 days. The Bubble and Microfoil balloons provided the best helium retention capabilities.
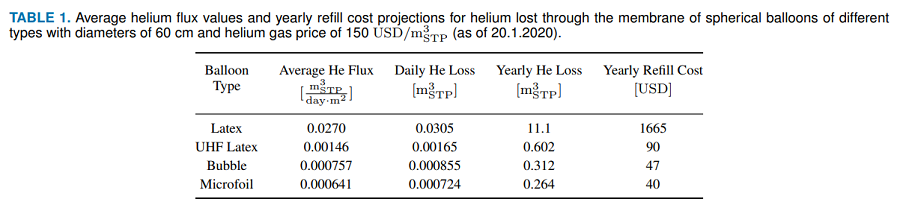
They determined that untreated latex was “the least appropriate” choice for their airship, and while the UHF-treated latex had better helium retention, it can easily burst if it hits a rough surface. The Microfoil and Bubble balloons had equally good helium retention, though the latter is not readily available in different sizes. The pair averaged the measurements of helium escape flux, and showed daily and yearly helium losses through the membrane of a 60 cm diameter balloon, in order to examine the cost of the platform.
“Using approximate retail balloon gas costs, the yearly expenses of compensating the lost helium were computed (note that the yearly costs do not include the initial cost of filling the balloon, which is 16.5 USD). Examining these yearly cost projections, it is evident that helium related maintenance of an indoor airship is cheap, given an appropriate choice of envelope material. Such platforms are thus feasible from an environmental and financial standpoint,” they concluded.
In terms of mechanical properties, the Bubble balloon had a 20% lower area density than the others, which equals a greater payload, while the latex balloon had a “comparably low tensile strength” and the Microfoil had the highest tensile strength, in addition to a lower elongation and minimal spread.
“The chosen envelope for this application was therefore the 90 cm Microfoil balloon, with excellent helium retention capabilities, high enough payload, and appropriate material strength characteristics,” the researchers stated.
They also found that the angled gondola had the best flight stability, and decreased the platform’s overall weight, as only the two side rotors were needed to control altitude and heading.
“The airship’s altitude during path following exhibited some oscillations (Figure 11b), but there was no collision with either the floor or the ceiling of the motion capture laboratory. The recorded altitude is lower than the goal (1.8 m), which was expected considering the fact that it was regulated by means of a simple proportional controller. Overall, the path following experiments showed that simultaneous heading and altitude control using only the two rotors is indeed feasible,” they wrote.
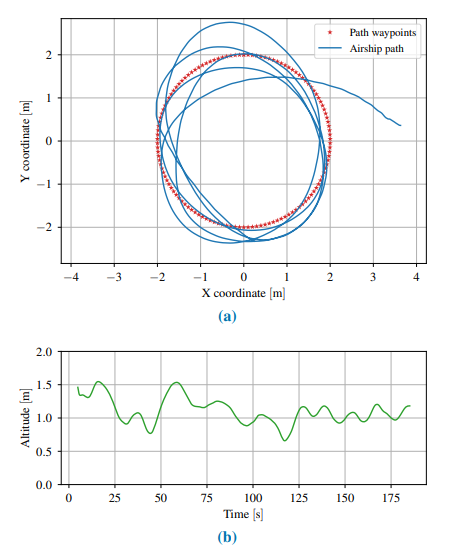
Fig. 11. Airship path (a) and altitude (b) with look ahead index Nt = 11 and heading gain Pψ = 50. The airship can track circular trajectory and maintain constant altitude with some oscillations.
The researchers determined that, with the right material, indoor airships are both financially and environmentally viable, and that their platform is well-suited for the purposes of education and research.
“For a mechanically-oriented curriculum, the students can work on gondola design and weight optimisation, developing their CAD and rapid prototyping skills. The airship is also ideal for control courses, where the students can develop and apply controllers that range from basic PID to complex, model-based control,” they concluded.
“For research, the small LTA platform is interesting in terms of controller development, as it is susceptible to drafts and ventilation that make reliable control difficult. Another opportunity is also in guidance and indoor exploration, where the challenge is to effectively utilise the limited computational power and simple RGB input to interpret its surroundings.”
Discuss this and other 3D printing topics at 3DPrintBoard.com or share your thoughts below.
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
HeyGears Unveils G1X, the World’s First Desktop Full-Color 3D & UV Printer
For creators, makers, studios, and small businesses, color has remained one of the biggest barriers in digital fabrication. Multi-color FDM is limited in detail and often creates waste towers, while...
Goal! 3D Printing for the 2026 FIFA World Cup
The 2026 FIFA World Cup officially kicked off in Mexico City on June 11th. It’s the largest FIFA tournament in history, with 48 teams competing over 104 matches. Instead of...
3D Printing News Briefs, April 22, 2026: DINOs, Post-Processing, AM for Aerostructures, & More
We’ll start with event news in today’s 3D Printing News Briefs, as AMUG presented its DINO Award to six members at this year’s conference, and Axtra3D celebrated its five-year anniversary...
From Print Farm to Toy of the Year: ZB Designs’ Plastic Empire Takes 3D Printed Fidgets Mainstream
Zack and Berkley Bailey, Co-Owners of ZB Designs, started their business with one 3D printer as a side hustle while still in college. On February 13, 2026, in New York...































