Researchers Make Kinetic Structures Out of Plastic Bottles, Linear Actuators, and 3D Printed Connectors



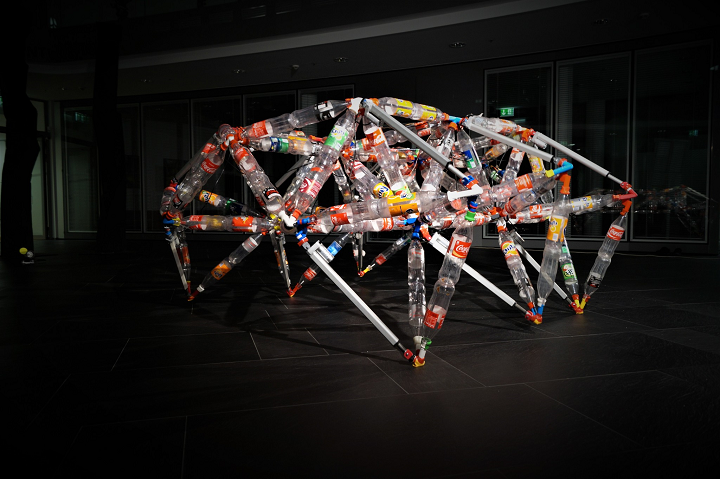
Last spring, we heard about an intriguing research project out of Germany’s Hasso-Plattner Institute (HPI), called TrussFab. The integrated, end-to-end 3D software system made it possible to design sturdy, large-scale structures, and then determine the proper distribution of recycled plastic bottles and 3D printed connectors to fabricate a strong end product, like a bridge, that could hold human weight.
While these structures were pretty interesting, they were static, as in non-moving. But HPI has completed a new research project, called TrussFormer, that builds on TrussFab and uses hinges and linear actuators to add movement to the structures.
 This new software system lets users make large-scale, kinetic structures, which involve motion and dynamic forces, out of 3D printed hubs and recycled plastic bottles. The HPI team is presenting its new paper, titled “TrussFormer: 3D Printing Large Kinetic Structures,” at the Human Computer Interaction conference (UIST) in Berlin this week; co-authors are Robert Kovacs, Alexandra Ion, Pedro Lopes, Tim Oesterreich, Johannes Filter, Philip Otto, Tobias Arndt, Nico Ring, Melvin Witte, Anton Synytsia from Oregon State University, and Patrick Baudisch.
This new software system lets users make large-scale, kinetic structures, which involve motion and dynamic forces, out of 3D printed hubs and recycled plastic bottles. The HPI team is presenting its new paper, titled “TrussFormer: 3D Printing Large Kinetic Structures,” at the Human Computer Interaction conference (UIST) in Berlin this week; co-authors are Robert Kovacs, Alexandra Ion, Pedro Lopes, Tim Oesterreich, Johannes Filter, Philip Otto, Tobias Arndt, Nico Ring, Melvin Witte, Anton Synytsia from Oregon State University, and Patrick Baudisch.
The abstract reads, “TrussFormer builds on TrussFab, from which it inherits the ability to create static large-scale truss structures from 3D printed connectors and PET bottles. TrussFormer adds movement to these structures by placing linear actuators into them: either manually, wrapped in reusable components called assets, or by demonstrating the intended movement. TrussFormer verifies that the resulting structure is mechanically sound and will withstand the dynamic forces resulting from the motion. To fabricate the design, TrussFormer generates the underlying hinge system that can be printed on standard desktop 3D printers. We demonstrate TrussFormer with several example objects, including a 6-legged walking robot and a 4m-tall animatronics dinosaur with 5 degrees of freedom.”

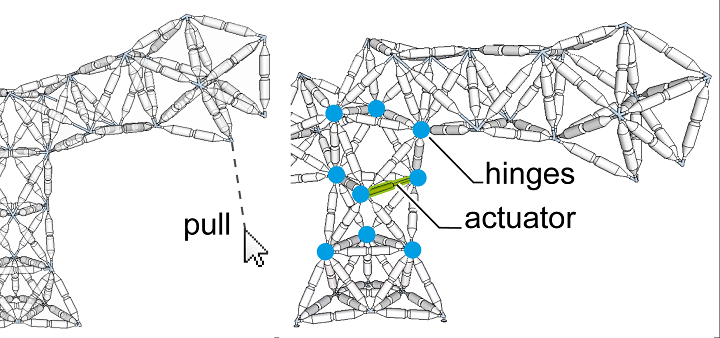
The system adds linear actuators into rigid truss structures, known as variable geometry trusses, to initiate organic movement, which means they hinge around several points at once. One example that illustrates this is a static tetrahedron that, when an edge is switched out with a linear actuator, becomes a moving structure. Rotation is possible by introducing connections, or hinges, at the nodes.
 The research team demonstrated the TrussFormer workflow on an animatronic model of a T-rex. First, the software designs the static structure shape with structurally stable primitives, such as octahedra and tetrahedra. With TrussFormer, there are three different ways to animate the structures:
The research team demonstrated the TrussFormer workflow on an animatronic model of a T-rex. First, the software designs the static structure shape with structurally stable primitives, such as octahedra and tetrahedra. With TrussFormer, there are three different ways to animate the structures:
- Automated placement
- Placing elements with pre-defined motion; known as assets
- Manual placement
The first way is for beginners, while the third is for users actively acquiring engineering knowledge. In order to add movement through the ‘demonstrate movement’ tool, the T-rex head is pulled down; then, the system places an actuator that turns the body into a structure capable of bending down.
TrussFormer then verifies that the mechanism is structurally sound during a stability check across the structure’s various poses, so that users don’t produce invalid configurations.
“In the background, TrussFormer finds the safe range of expansion and contraction of the placed actuator by simulating the occurring forces in a range of positions,” the researchers explained on their HPI project page. “If there is a pose where the forces exceed the pre-determined breaking limits or the structure would tip over, TrussFormer sets the limits for the actuator so it will not extend beyond them.”
Once the animation pane is opened in the software’s toolbar, sliders can be used to manually control and try out the structure’s movement. Once the desired pose is found, users can add it to the animation timeline as a keyframe. This allows TrussFormer users to orchestrate how all of the actuators move with just a simple timeline and editor: for instance, a feeding behavior, where the T-rex opens its mouth, leans down, and waves its tail, can be easily programmed.
 Once the user has defined the structure’s animation, TrussFormer then computes the dynamic forces. In the example of the T-rex body moving up and down, the long neck’s large acceleration leads to high inertial forces, which goes past the construction’s breaking limit and causes the structure to fail. It can be hard to realize this ahead of time, because often times inertial forces are far higher than the static load in a structure. That’s why the software automatically corrects the animation sequence – limiting either the range of movement or acceleration – so that the structure will be able to hold up.
Once the user has defined the structure’s animation, TrussFormer then computes the dynamic forces. In the example of the T-rex body moving up and down, the long neck’s large acceleration leads to high inertial forces, which goes past the construction’s breaking limit and causes the structure to fail. It can be hard to realize this ahead of time, because often times inertial forces are far higher than the static load in a structure. That’s why the software automatically corrects the animation sequence – limiting either the range of movement or acceleration – so that the structure will be able to hold up.
The ‘fabricate’ button is pushed once users are satisfied with the design’s structure, movement, and animation. This will then start the hinge generation algorithm, which analyzes the motion of the structure and generates the correct geometries for 3D printable hubs and hinges; these come with imprinted IDs for easy assembly. For the T-rex, 42 hubs, with 135 hinging pieces, are exported.
The software exports the animation patterns as Arduino code, and finally outputs a specification file with the speed, motion range, and force of the actuators so users can “achieve the desired animation pattern.”
“TrussFormer helps users in the 3 main steps along the design process,” the researchers conclude. “(1) It enables users to animate large truss structures by adding linear actuators to them. It offers three tools for this purpose: manual actuator placement, placement of assets performing predefined motion, and creating motion by demonstration. (2) TrussFormer validates the design in real time against static forces, static forces across all poses, and dynamic forces. (3) TrussFormer automatically generates the necessary 3D printable hinges for fabricating the structure. Its algorithm determines the placement and configuration of the hinges and their exact dimensions.”
Discuss this and other 3D printing topics at 3DPrintBoard.com or share your thoughts below.
[Images: Hasso-Plattner Institute]
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.











You May Also Like
UAS Additive Strategies: Register by June 30 to Learn About the Hottest Topic in 3D Printing
Last week, drone stocks surged on news that the Trump administration is considering a massive investment in the US unmanned aerial vehicle (UAV) industry. Earlier in 2026, the release of...
Stratasys Dental’s Negar Movahed Says They’re “Open for Partnerships”
According to “3D Printing for Dentistry 2025: Market Study and Forecast” by AM Research, the dental 3D printing market generated $5.2 billion in revenue in 2024—that’s nearly one third of...
3D Printing News Briefs, May 30, 2026: RIMPAC 2026, Acquisition, Ceramic Implants, & More
We’re kicking things off with materials news in this weekend’s 3D Printing News Briefs. Then it’s on to a hybrid manufacturing system for a maritime exercise, an expansion of industrial...
3D Printing News Briefs, May 23, 2026: Inserts, Racing, Cultural Heritage, & More
In this weekend’s 3D Printing News Briefs, 3D People has integrated threaded inserts into its online quoting tool, AM Solutions has introduced a more compact solution for automated cleaning and...