Brazil: 3D Printing an Affordable & Programmable Robotic Prosthetic

Brazilian researchers Thiago A. do Carmo, Regina E. S. Cabette, and Renato G. Gomes delve further into 3D printed prosthetics, releasing their findings in the recently published ‘Prototype of robotic mechanical prosthesis of upper limb at low cost.’
With the advent of 3D printing, and as the technology and materials have become more accessible around the world—scientists are making huge strides in creating customized medical devices like prosthetics. Many other users have been inspired to help those in need also, leading to middle schoolers helping others in HandChallenge, a teen printing a prosthetic for his father, and organizations like e-NABLE continuing to assist individuals of all ages in need of limb replacements.
This study focuses on greater affordability and complexity in robotic prosthetics, as well as accompanying programmable solutions meant to increase functionality in the lives of the disabled. With 3D printing, EMG sensors, and strain gauge force sensors, the authors aim to offer better social interaction via limb replacements, along with greater dexterity—and overall, better quality of life.
Designs were modeled in AutoDesk and then parts were 3D printed on an AnetA8 printer, a kit that is both popular and extremely low-cost; however, the researchers were forced to work beyond its limitations, adding an inductive sensor for detecting metallic materials, updating and modifying firmware, and calibration.
The structure of the prosthetic design was meant to mimic the bone structure of the hand, made up of 27 bones:
“Thus, at the end of the modeling of the structures, the equivalent of 37 pieces was reached, all of them structured so that it was possible to pass internal cables to perform the movement of the fingers during an action.”
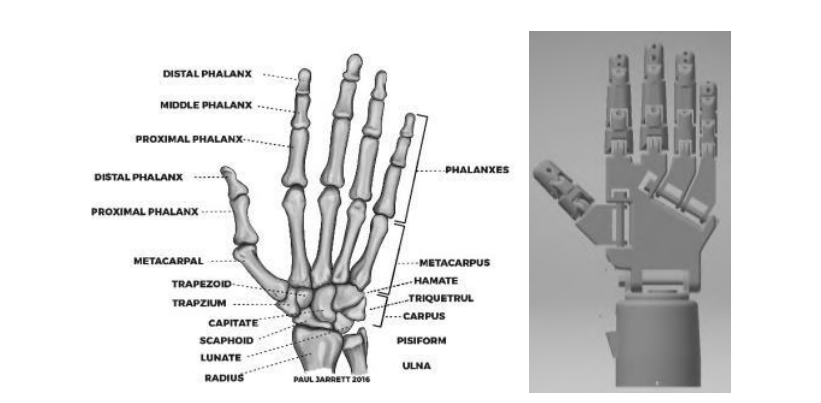
Comparison between real model (left) & Developed in this work (right)
Perforations (diameter of 2mm each) were created for cables made of nylon monofilament to pass through. Steel screws were used to attach the fist by the hand and fingers, and hard copper was used for connecting finger links.
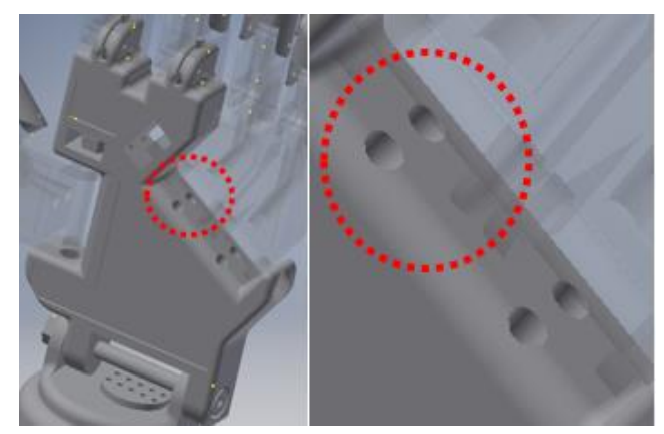
Structure for cable routing
PLA was the material of choice for the first phase due to its melting point of around 190°C and simple adhesion requirements. The research team used Simplify3D V4.1 to set parameters for printing, along with estimating how much filament they would need, and how long 3D printing would take.
High torque 13 kg / cm servo motors were used when powered at 4.8v, with 4.8 – 7.2 V operating capacity. The accompanying gears made of metal allowed for less wear, ensuring better reliability in torque and movement of the digits.
A force sensor with a measuring range between 100 grams to approximately 10kg was used, featuring a detection area of 15mm, in a circular format. Strain gauge sensors were also placed in the palm of the prosthesis:
“The purpose of this sensor was to prevent structures from being detected during the closing movement of the fingers, and during contact, it prevents the fingers from closing irregularly, causing damage to the structure,” stated the researchers. “The sensor has a circular shape with approximately 10 cm in diameter and is located on the palm of the prosthesis.”

Sensor Strain Gauge
EMG sensors also presented limitations, mainly in measuring only one muscle EMG stimulus, noise, and setpoint adjustments—leading the researchers to modify the position of the target musculature.
Sensor EMG Advancer V3
“The results showed that, based on the implementations performed, the sensory application proved to be satisfactory in view that the results measured between the prosthesis and the target musculature, were measured and converted into movements for the equipment,” stated the researchers.
“Thus, the force sensor was able to stop the movement, preventing the fingers from closing in such a way as to damage the joint structure of the prosthesis. The structures printed in PLA filament are also sufficiently controlled during the assembly steps, considering that they were able to withstand a force exerted by the servo motor equivalent to 13kg in the process of pressing the fingers.”
On assessing overall project development, the researchers stated that ‘final acquisition value of the project’ was around R$ 2,000.00 (translating to around $365 US).
“Aiming at future studies involving the improvement project of mechanical prostheses, sensors that may simulate the touch of a surface similar to human skin may be provided, as well as the insertion of new force and EMG sensors to better treat the stimulus signals dissipated in the muscle ventricle. In this way, the project should pass through new structural dimensions such as modeling and printing of new parts that can reduce limitations of the current structure, for example, the non-displacement of the fingers on the Cartesian x axis,” concluded the researchers.
“As a means of providing greater flexibility through the printed structures of the prostheses, the use of filaments such as TPU (polyurethane thermoplastic), total or partial, is estimated for items that may require multidirectional behaviors, such as prerotation of the fingers. The servo motors used in the arm structure take up too much space to the real needs, aiming at the use for people with only hand amputations, it will be necessary to use smaller motors, and also the space needed for their allocation in the prosthesis structure.”
What do you think of this news? Let us know your thoughts! Join the discussion of this and other 3D printing topics at 3DPrintBoard.com.
[Source / Images: ‘Prototype of robotic mechanical prosthesis of upper limb at low cost’]Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
You May Also Like
Precision at the Microscale: UK Researchers Advance Medical Devices with BMF’s 3D Printing Tech
University of Nottingham researchers are using Boston Micro Fabrication‘s (BMF) 3D printing technology to develop medical devices that improve compatibility with human tissue. Funded by a UK grant, this project...
3D Printing Webinar and Event Roundup: April 21, 2024
It’s another busy week of webinars and events, starting with Hannover Messe in Germany and continuing with Metalcasting Congress, Chinaplas, TechBlick’s Innovation Festival, and more. Stratasys continues its advanced training...
3D Printing Webinar and Event Roundup: March 17, 2024
It’s another busy week of webinars and events, including SALMED 2024 and AM Forum in Berlin. Stratasys continues its in-person training and is offering two webinars, ASTM is holding a...
3D Printed Micro Antenna is 15% Smaller and 6X Lighter
Horizon Microtechnologies has achieved success in creating a high-frequency D-Band horn antenna through micro 3D printing. However, this achievement did not rely solely on 3D printing; it involved a combination...