DyRoS, the 3D Printed Humanoid Robot, Presented at ‘Humanoids 2014’

This is a more robust CNC manufactured version of the 3D printed robot.
He’s upright. He’s functional. He even dances. This is the humanoid robot design, also known as DyRoS, produced through CNC machining after using the invaluable process of 3D design and 3D printing to form a visualization of the structure, as well as allow for testing. A culmination of an ongoing project by The Digital Human Research Center, funded by the Advanced Institutes of Convergence Technology, DyRoS was presented last week at Humanoids 2014, an international conference on humanoid robots.
DyRoS is not only a project in engineering but an exercise in aesthetics, as its creators hope to see an integration of art and engineering meld together — even exemplifying this through making the robot part of a contemporary Korean dance performance. Aesthetics is one of the first topics the creators of the robot discuss in their paper Aesthetic Design and Development of Humanoid Legged Robot, positing that the way the robot — or any product, obviously — looks has everything to do with how the human perceives its worth and functionality.
 We apparently tend to judge a humanoid robot by his locomotion and how well we think he ‘walks.’ Also of interest is that the designers point out that aesthetics are more important than the robot appearing human. While he doesn’t need to appear to look exactly like a human, we tend to be more receptive to the robot and accepting of his capabilities if he represents a general outline and size representative of the human body.
We apparently tend to judge a humanoid robot by his locomotion and how well we think he ‘walks.’ Also of interest is that the designers point out that aesthetics are more important than the robot appearing human. While he doesn’t need to appear to look exactly like a human, we tend to be more receptive to the robot and accepting of his capabilities if he represents a general outline and size representative of the human body.
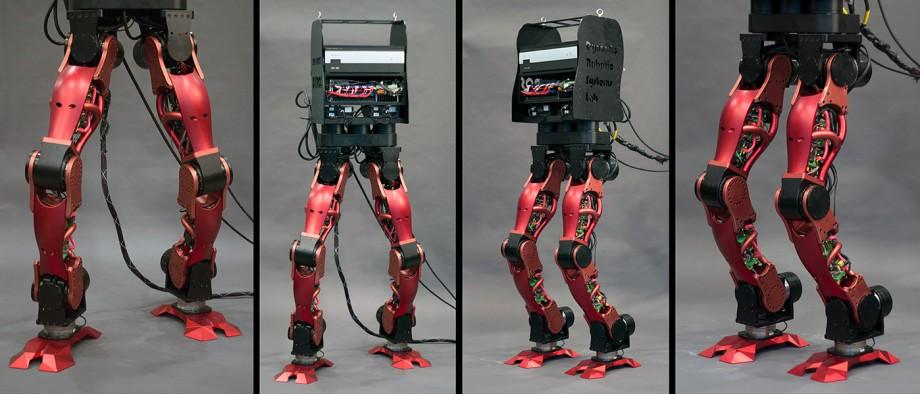
DyRoS was created in South Korea, and the robot’s size proportions are approximate to that of the average South Korean female. The ‘legs’ do imitate human anatomy in a rudimentary way, while still making exceptions for the placement of the motors.

Some of the 3D printed parts for the robot
The Digital Human Research Center led the aesthetic design and manufacturing, while the Dynamic Robotic Systems Lab led the electronic specifications and mechanical manufacturing. DyRoS began as a simple sketch which after multiple iterations was transformed into a 3D design, culminating in a 3D printed model which was assembled for testing. Colors of the robot were visualized through renderings in 3D studio Max, with the main parts anodized in red and the basic parts anodized in black.
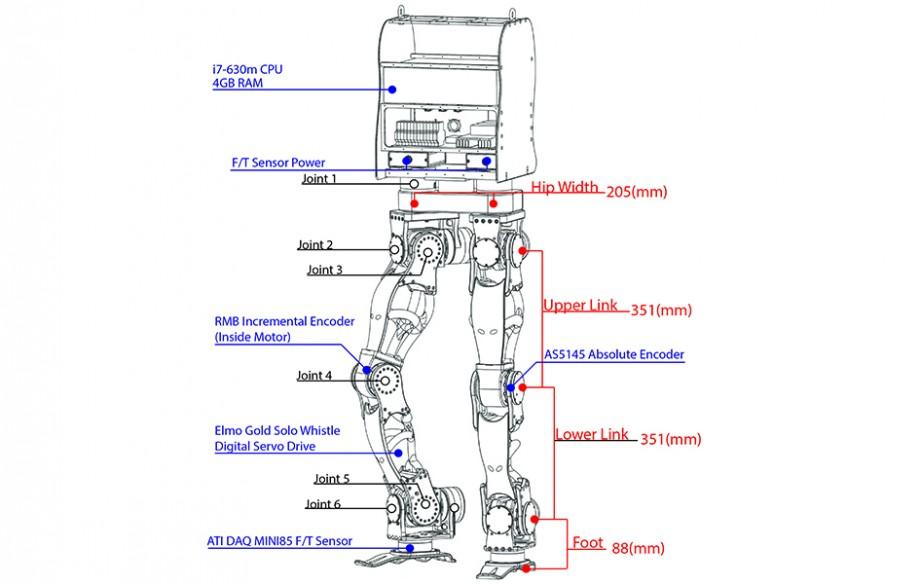
The structural design of DyRoS is deceptively simple in that assembly of the frame is completed with a minimal amount of bolts, which allow easy access to the electronics. The computer is housed in the ‘torso’ which will eventually, with future design and development, transform into an entire upper body for the robot which currently runs on an Intel I7-630m processor and 4Gbyte DDR3 RAM. The computer also runs roboticsLab as realtime control software.
DHRC has made the design for DyRoS open source, and they look forward to seeing what variety of sizes as well as further affordability other users can lend to the design. Have you been involved in 3D printing to create or test any robotics? Tell us about it in the DyRoS forum at 3DPB.com.

Contemporary Korean dance performance
Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
You May Also Like
3D Printing News Unpeeled: A $3000 SLS System, Construction Subsidies and Parameters
The Housing Affordability Crisis is one of Canadian President Trudeau’s biggest issues. Now the government has made subsidies available, including scaling new technologies, 3D printed housing and libraries of reapproved...
“Bundled Light” Enables High Quality Plastic 3D Printing from LEAM
Naturally, we expect current 3D printing methods to continuously improve, but it continues to do so in the most surprising ways. The latest development comes from LEAM, a startup spun...
Each to Their Own: Exploring Creality’s Latest Ender Trio as the Company Strengthens Its Commitment to 3D Printing Advocacy
Creality has reaffirmed its commitment to promoting 3D printing. The launch of the Ender-3 V3 SE, Ender-3 V3 KE, and Ender-3 V3 showcases the company’s dedication to catering to diverse...
3D Printing News Briefs, March 23, 2024: AM in the US Coast Guard, Navy, & More
In today’s 3D Printing News Briefs, we’re discussing the use of 3D printing in various branches of the military, including the U.S. Coast Guard, the U.S. Navy, and the German...